diff --git a/unit3/README.md b/unit3/README.md
index 1536f73..07f17c3 100644
--- a/unit3/README.md
+++ b/unit3/README.md
@@ -20,7 +20,9 @@ Here are the steps for this Unit:
1️⃣ 📖 **Read [Deep Q-Learning with Atari chapter](https://huggingface.co/blog/deep-rl-dqn)**.
-2️⃣ 👩💻 Then dive on the hands-on, where **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning hyperparameters, plotting results and recording videos.
+2️⃣ 📝 Take a piece of paper and check your knowledge with this series of questions ❔ 👉 https://github.com/huggingface/deep-rl-class/blob/main/unit3/quiz.md
+
+3️⃣ 👩💻 Then dive on the hands-on, where **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning hyperparameters, plotting results and recording videos.
Thanks to a leaderboard, **you'll be able to compare your results with other classmates** and exchange the best practices to improve your agent's scores Who will win the challenge for Unit 2 🏆?
@@ -30,7 +32,7 @@ The leaderboard 👉 https://huggingface.co/spaces/chrisjay/Deep-Reinforcement-L
You can work directly **with the colab notebook, which allows you not to have to install everything on your machine (and it’s free)**.
-3️⃣ The best way to learn **is to try things on your own**. That’s why we have a challenges section in the colab where we give you some ideas on how you can go further: using another environment, using another model etc.
+4️⃣ The best way to learn **is to try things on your own**. That’s why we have a challenges section in the colab where we give you some ideas on how you can go further: using another environment, using another model etc.
## Additional readings 📚
- [Foundations of Deep RL Series, L2 Deep Q-Learning by Pieter Abbeel](https://youtu.be/Psrhxy88zww)
diff --git a/unit3/quiz.md b/unit3/quiz.md
new file mode 100644
index 0000000..281938a
--- /dev/null
+++ b/unit3/quiz.md
@@ -0,0 +1,93 @@
+# Knowledge Check ✔️
+
+The best way to learn and [avoid the illusion of competence](https://fr.coursera.org/lecture/learning-how-to-learn/illusions-of-competence-BuFzf) **is to test yourself.** This will help you to find **where you need to reinforce your knowledge**.
+
+📝 Take a piece of paper and try to answer by writing, **then check the solutions**.
+
+### Q1: What are tabular methods?
+
+
+Solution
+
+*Tabular methods* are a type of problems in which the state and actions spaces are small enough to approximate value functions to be **represented as arrays and tables**. For instance, **Q-Learning is a tabular method** since we use a table to represent the state,action value pairs.
+
+📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#from-q-learning-to-deep-q-learning
+
+
+
+
+### Q2: Why we can use a classical Q-Learning to solve an Atari Game?
+
+Solution
+
+Atari environments have an observation space with a shape of (210, 160, 3), containing values ranging from 0 to 255, so that gives us 256^(210x160x3) = 256^100800 (**for comparison, we have approximately 10^80 atoms in the observable universe**).
+
+Therefore, the state space is gigantic; hence creating and updating a Q-table for that environment **would not be efficient**. In this case, the best idea is to approximate the Q-values instead of a Q-table using a parametrized Q-function $Q_{\theta}(s,a)$.
+
+📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#from-q-learning-to-deep-q-learning
+
+
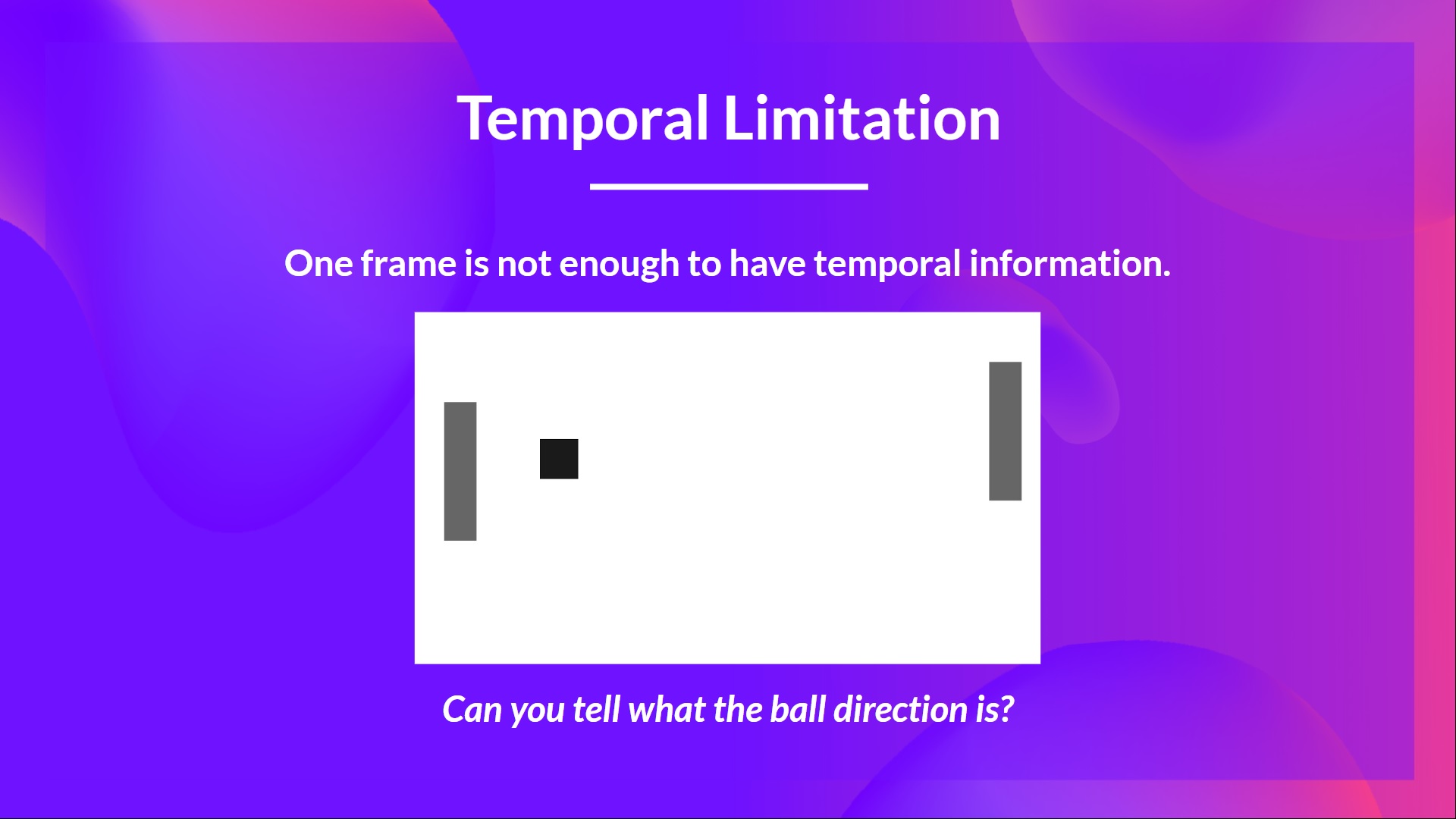
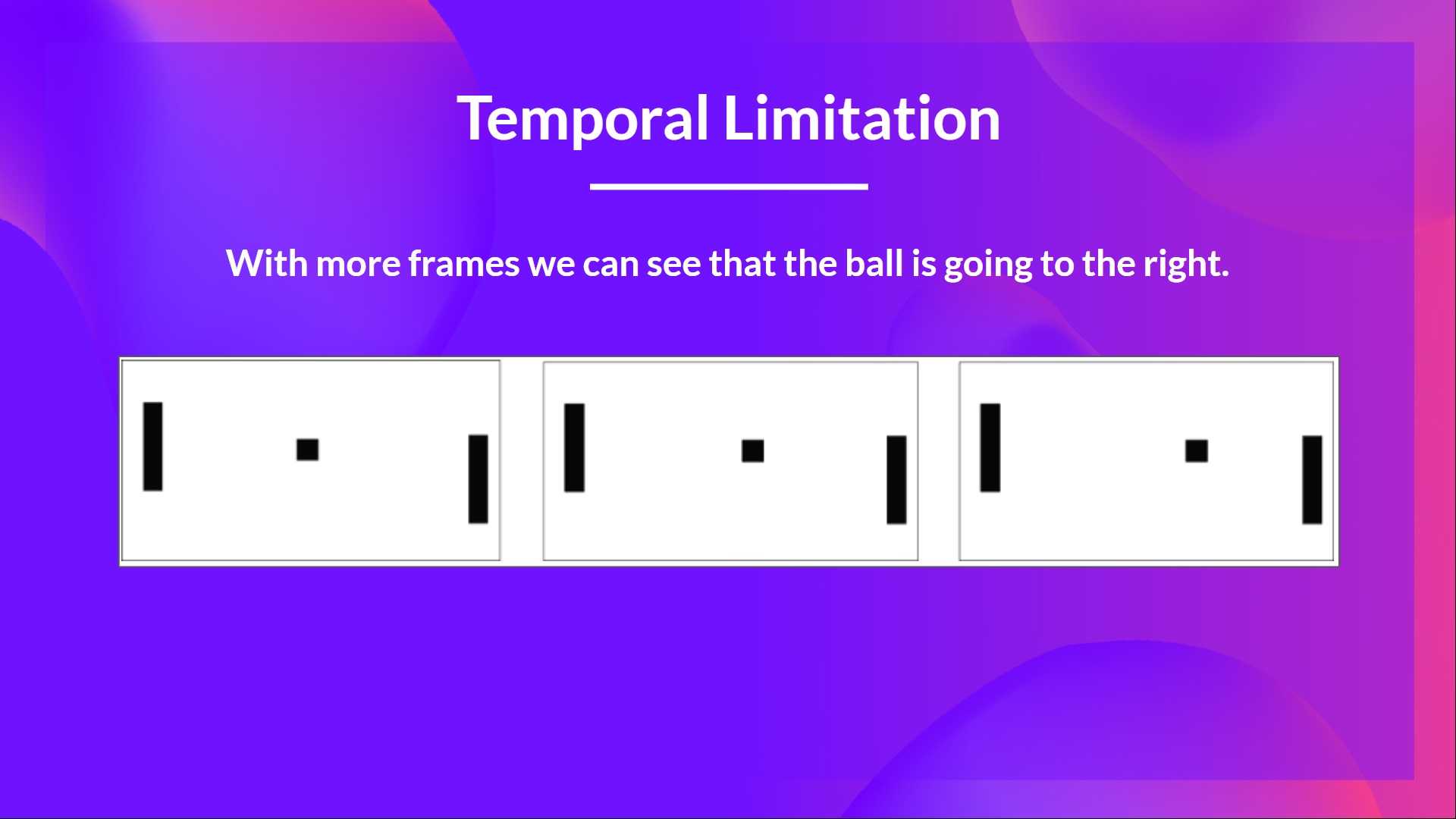
+### Q3: Why do we stack four frames together when we use frames as input in Deep Q-Learning?
+
+
+Solution
+
+We stack frames together because it helps us **handle the problem of temporal limitation**. Since one frame is not enough to capture temporal information.
+For instance, in pong, our agent **will be unable to know the ball direction if it gets only one frame**.
+
+ +
+ +
+
+📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#preprocessing-the-input-and-temporal-limitation
+
+
+
+📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#preprocessing-the-input-and-temporal-limitation
+
+
+### Q4: What are the two phases of Deep Q-Learning?
+
+
+ Solution
+
+The Deep Q-Learning training algorithm has two phases:
+- *Sampling* : we perform actions and **store the observed experiences tuples in a replay memory**.
+- *Training* : Select the small batch of tuple randomly and **learn from it using a gradient descent update step**.
+
+📖 If you don't remember, check 👉 [https://huggingface.co/blog/deep-rl-dqn#preprocessing-the-input-and-temporal-limitation](https://huggingface.co/blog/deep-rl-dqn#the-deep-q-learning-algorithm)
+
+
+### Q5: Why do we create a replay memory in Deep Q-Learning?
+
+
+ Solution
+
+**1. Make more efficient use of the experiences during the training**
+
+Usually, in online reinforcement learning, we interact in the environment, get experiences (state, action, reward, and next state), learn from them (update the neural network) and discard them.
+But with experience replay, **we create a replay buffer that saves experience samples that we can reuse during the training**.
+
+**2. Avoid forgetting previous experiences and reduce the correlation between experiences**
+
+ The problem we get if we give sequential samples of experiences to our neural network is that it **tends to forget the previous experiences as it overwrites new experiences**. For instance, if we are in the first level and then the second, which is different, our agent can forget how to behave and play in the first level.
+
+📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#experience-replay-to-make-more-efficient-use-of-experiences
+
+
+
+### Q6: How do we use Double Deep Q-Learning?
+
+
+
+ Solution
+
+ When we compute the Q target, we use two networks to decouple the action selection from the target Q value generation. We:
+
+ - Use our *DQN network* to **select the best action to take for the next state** (the action with the highest Q value).
+
+ - Use our *Target network* to calculate **the target Q value of taking that action at the next state**.
+
+
+
+---
+
+Congrats on **finishing this Quiz** 🥳, if you missed some elements, take time to [read the chapter again](https://huggingface.co/blog/deep-rl-q-part1) to reinforce (😏) your knowledge.
+
+**Keep Learning, Stay Awesome**