diff --git a/notebooks/unit6/requirements-unit6.txt b/notebooks/unit6/requirements-unit6.txt
index 1c8ffaa..cf5db2d 100644
--- a/notebooks/unit6/requirements-unit6.txt
+++ b/notebooks/unit6/requirements-unit6.txt
@@ -1,4 +1,4 @@
-stable-baselines3[extra]
+stable-baselines3==2.0.0a4
huggingface_sb3
-panda_gym==2.0.0
-pyglet==1.5.1
+panda-gym
+huggingface_hub
\ No newline at end of file
diff --git a/units/en/_toctree.yml b/units/en/_toctree.yml
index e844292..26327a5 100644
--- a/units/en/_toctree.yml
+++ b/units/en/_toctree.yml
@@ -159,7 +159,7 @@
- local: unit6/advantage-actor-critic
title: Advantage Actor Critic (A2C)
- local: unit6/hands-on
- title: Advantage Actor Critic (A2C) using Robotics Simulations with PyBullet and Panda-Gym 🤖
+ title: Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖
- local: unit6/conclusion
title: Conclusion
- local: unit6/additional-readings
diff --git a/units/en/unit6/hands-on.mdx b/units/en/unit6/hands-on.mdx
index b6c063b..d1035ae 100644
--- a/units/en/unit6/hands-on.mdx
+++ b/units/en/unit6/hands-on.mdx
@@ -1,4 +1,4 @@
-# Advantage Actor Critic (A2C) using Robotics Simulations with PyBullet and Panda-Gym 🤖 [[hands-on]]
+# Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖 [[hands-on]]
-Now that you've studied the theory behind Advantage Actor Critic (A2C), **you're ready to train your A2C agent** using Stable-Baselines3 in robotic environments. And train two robots:
-
-- A spider 🕷️ to learn to move.
+Now that you've studied the theory behind Advantage Actor Critic (A2C), **you're ready to train your A2C agent** using Stable-Baselines3 in a robotic environment. And train a:
- A robotic arm 🦾 to move to the correct position.
-We're going to use two Robotics environments:
-
-- [PyBullet](https://github.com/bulletphysics/bullet3)
+We're going to use
- [panda-gym](https://github.com/qgallouedec/panda-gym)
- -
-
To validate this hands-on for the certification process, you need to push your two trained models to the Hub and get the following results:
-- `AntBulletEnv-v0` get a result of >= 650.
-- `PandaReachDense-v2` get a result of >= -3.5.
+- `PandaReachDense-v3` get a result of >= -3.5.
To find your result, [go to the leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) and find your model, **the result = mean_reward - std of reward**
-**If you don't find your model, go to the bottom of the page and click on the refresh button.**
-
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
**To start the hands-on click on Open In Colab button** 👇 :
@@ -37,11 +27,10 @@ For more information about the certification process, check this section 👉 ht
[](https://colab.research.google.com/github/huggingface/deep-rl-class/blob/master/notebooks/unit6/unit6.ipynb)
-# Unit 6: Advantage Actor Critic (A2C) using Robotics Simulations with PyBullet and Panda-Gym 🤖
+# Unit 6: Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖
### 🎮 Environments:
-- [PyBullet](https://github.com/bulletphysics/bullet3)
- [Panda-Gym](https://github.com/qgallouedec/panda-gym)
### 📚 RL-Library:
@@ -54,12 +43,13 @@ We're constantly trying to improve our tutorials, so **if you find some issues i
At the end of the notebook, you will:
-- Be able to use the environment librairies **PyBullet** and **Panda-Gym**.
+- Be able to use **Panda-Gym**, the environment library.
- Be able to **train robots using A2C**.
- Understand why **we need to normalize the input**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
## Prerequisites 🏗️
+
Before diving into the notebook, you need to:
🔲 📚 Study [Actor-Critic methods by reading Unit 6](https://huggingface.co/deep-rl-course/unit6/introduction) 🤗
@@ -99,30 +89,31 @@ virtual_display.start()
```
### Install dependencies 🔽
-The first step is to install the dependencies, we’ll install multiple ones:
-- `pybullet`: Contains the walking robots environments.
+We’ll install multiple ones:
+
+- `gymnasium`
- `panda-gym`: Contains the robotics arm environments.
-- `stable-baselines3[extra]`: The SB3 deep reinforcement learning library.
+- `stable-baselines3`: The SB3 deep reinforcement learning library.
- `huggingface_sb3`: Additional code for Stable-baselines3 to load and upload models from the Hugging Face 🤗 Hub.
- `huggingface_hub`: Library allowing anyone to work with the Hub repositories.
```bash
-!pip install stable-baselines3[extra]==1.8.0
-!pip install huggingface_sb3
-!pip install panda_gym==2.0.0
-!pip install pyglet==1.5.1
+!pip install stable-baselines3[extra]
+!pip install gymnasium
+!pip install git+https://github.com/huggingface/huggingface_sb3@gymnasium-v2
+!pip install huggingface_hub
+!pip install panda_gym
```
## Import the packages 📦
```python
-import pybullet_envs
-import panda_gym
-import gym
-
import os
+import gymnasium as gym
+import panda_gym
+
from huggingface_sb3 import load_from_hub, package_to_hub
from stable_baselines3 import A2C
@@ -133,45 +124,61 @@ from stable_baselines3.common.env_util import make_vec_env
from huggingface_hub import notebook_login
```
-## Environment 1: AntBulletEnv-v0 🕸
+## PandaReachDense-v3 🦾
+
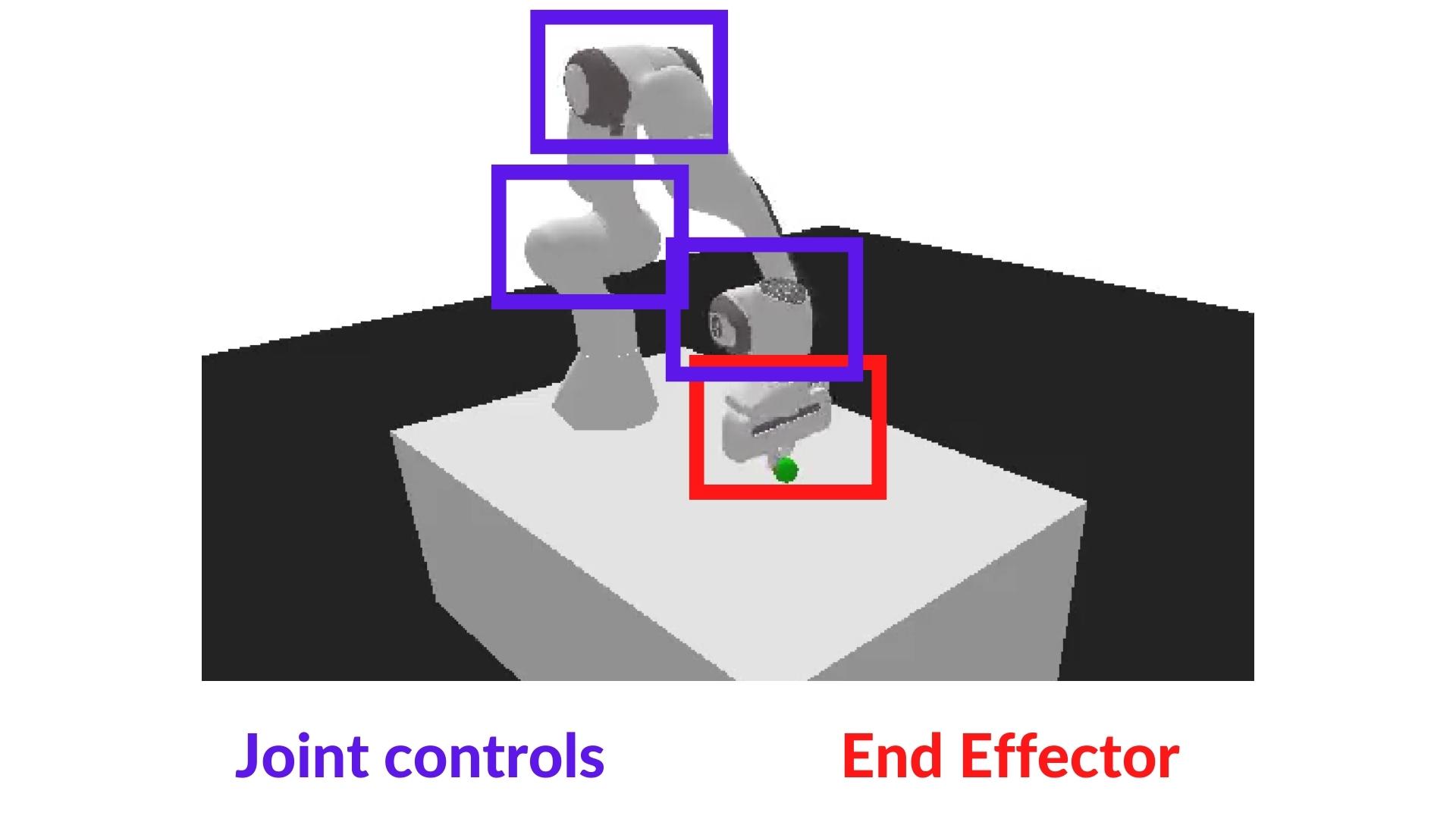
+The agent we're going to train is a robotic arm that needs to do controls (moving the arm and using the end-effector).
+
+In robotics, the *end-effector* is the device at the end of a robotic arm designed to interact with the environment.
+
+In `PandaReach`, the robot must place its end-effector at a target position (green ball).
+
+We're going to use the dense version of this environment. It means we'll get a *dense reward function* that **will provide a reward at each timestep** (the closer the agent is to completing the task, the higher the reward). Contrary to a *sparse reward function* where the environment **return a reward if and only if the task is completed**.
+
+Also, we're going to use the *End-effector displacement control*, it means the **action corresponds to the displacement of the end-effector**. We don't control the individual motion of each joint (joint control).
+
+
-
-
To validate this hands-on for the certification process, you need to push your two trained models to the Hub and get the following results:
-- `AntBulletEnv-v0` get a result of >= 650.
-- `PandaReachDense-v2` get a result of >= -3.5.
+- `PandaReachDense-v3` get a result of >= -3.5.
To find your result, [go to the leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) and find your model, **the result = mean_reward - std of reward**
-**If you don't find your model, go to the bottom of the page and click on the refresh button.**
-
For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
**To start the hands-on click on Open In Colab button** 👇 :
@@ -37,11 +27,10 @@ For more information about the certification process, check this section 👉 ht
[](https://colab.research.google.com/github/huggingface/deep-rl-class/blob/master/notebooks/unit6/unit6.ipynb)
-# Unit 6: Advantage Actor Critic (A2C) using Robotics Simulations with PyBullet and Panda-Gym 🤖
+# Unit 6: Advantage Actor Critic (A2C) using Robotics Simulations with Panda-Gym 🤖
### 🎮 Environments:
-- [PyBullet](https://github.com/bulletphysics/bullet3)
- [Panda-Gym](https://github.com/qgallouedec/panda-gym)
### 📚 RL-Library:
@@ -54,12 +43,13 @@ We're constantly trying to improve our tutorials, so **if you find some issues i
At the end of the notebook, you will:
-- Be able to use the environment librairies **PyBullet** and **Panda-Gym**.
+- Be able to use **Panda-Gym**, the environment library.
- Be able to **train robots using A2C**.
- Understand why **we need to normalize the input**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
## Prerequisites 🏗️
+
Before diving into the notebook, you need to:
🔲 📚 Study [Actor-Critic methods by reading Unit 6](https://huggingface.co/deep-rl-course/unit6/introduction) 🤗
@@ -99,30 +89,31 @@ virtual_display.start()
```
### Install dependencies 🔽
-The first step is to install the dependencies, we’ll install multiple ones:
-- `pybullet`: Contains the walking robots environments.
+We’ll install multiple ones:
+
+- `gymnasium`
- `panda-gym`: Contains the robotics arm environments.
-- `stable-baselines3[extra]`: The SB3 deep reinforcement learning library.
+- `stable-baselines3`: The SB3 deep reinforcement learning library.
- `huggingface_sb3`: Additional code for Stable-baselines3 to load and upload models from the Hugging Face 🤗 Hub.
- `huggingface_hub`: Library allowing anyone to work with the Hub repositories.
```bash
-!pip install stable-baselines3[extra]==1.8.0
-!pip install huggingface_sb3
-!pip install panda_gym==2.0.0
-!pip install pyglet==1.5.1
+!pip install stable-baselines3[extra]
+!pip install gymnasium
+!pip install git+https://github.com/huggingface/huggingface_sb3@gymnasium-v2
+!pip install huggingface_hub
+!pip install panda_gym
```
## Import the packages 📦
```python
-import pybullet_envs
-import panda_gym
-import gym
-
import os
+import gymnasium as gym
+import panda_gym
+
from huggingface_sb3 import load_from_hub, package_to_hub
from stable_baselines3 import A2C
@@ -133,45 +124,61 @@ from stable_baselines3.common.env_util import make_vec_env
from huggingface_hub import notebook_login
```
-## Environment 1: AntBulletEnv-v0 🕸
+## PandaReachDense-v3 🦾
+
+The agent we're going to train is a robotic arm that needs to do controls (moving the arm and using the end-effector).
+
+In robotics, the *end-effector* is the device at the end of a robotic arm designed to interact with the environment.
+
+In `PandaReach`, the robot must place its end-effector at a target position (green ball).
+
+We're going to use the dense version of this environment. It means we'll get a *dense reward function* that **will provide a reward at each timestep** (the closer the agent is to completing the task, the higher the reward). Contrary to a *sparse reward function* where the environment **return a reward if and only if the task is completed**.
+
+Also, we're going to use the *End-effector displacement control*, it means the **action corresponds to the displacement of the end-effector**. We don't control the individual motion of each joint (joint control).
+
+ +
+This way **the training will be easier**.
+
+### Create the environment
-### Create the AntBulletEnv-v0
#### The environment 🎮
-In this environment, the agent needs to use its different joints correctly in order to walk.
-You can find a detailled explanation of this environment here: https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet
+In `PandaReachDense-v3` the robotic arm must place its end-effector at a target position (green ball).
```python
-env_id = "AntBulletEnv-v0"
+env_id = "PandaReachDense-v3"
+
# Create the env
env = gym.make(env_id)
# Get the state space and action space
-s_size = env.observation_space.shape[0]
+s_size = env.observation_space.shape
a_size = env.action_space
```
```python
print("_____OBSERVATION SPACE_____ \n")
print("The State Space is: ", s_size)
-print("Sample observation", env.observation_space.sample()) # Get a random observation
+print("Sample observation", env.observation_space.sample()) # Get a random observation
```
-The observation Space (from [Jeffrey Y Mo](https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet)):
-The difference is that our observation space is 28 not 29.
+The observation space **is a dictionary with 3 different elements**:
-
+
+This way **the training will be easier**.
+
+### Create the environment
-### Create the AntBulletEnv-v0
#### The environment 🎮
-In this environment, the agent needs to use its different joints correctly in order to walk.
-You can find a detailled explanation of this environment here: https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet
+In `PandaReachDense-v3` the robotic arm must place its end-effector at a target position (green ball).
```python
-env_id = "AntBulletEnv-v0"
+env_id = "PandaReachDense-v3"
+
# Create the env
env = gym.make(env_id)
# Get the state space and action space
-s_size = env.observation_space.shape[0]
+s_size = env.observation_space.shape
a_size = env.action_space
```
```python
print("_____OBSERVATION SPACE_____ \n")
print("The State Space is: ", s_size)
-print("Sample observation", env.observation_space.sample()) # Get a random observation
+print("Sample observation", env.observation_space.sample()) # Get a random observation
```
-The observation Space (from [Jeffrey Y Mo](https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet)):
-The difference is that our observation space is 28 not 29.
+The observation space **is a dictionary with 3 different elements**:
- +- `achieved_goal`: (x,y,z) position of the goal.
+- `desired_goal`: (x,y,z) distance between the goal position and the current object position.
+- `observation`: position (x,y,z) and velocity of the end-effector (vx, vy, vz).
+Given it's a dictionary as observation, **we will need to use a MultiInputPolicy policy instead of MlpPolicy**.
```python
print("\n _____ACTION SPACE_____ \n")
print("The Action Space is: ", a_size)
-print("Action Space Sample", env.action_space.sample()) # Take a random action
+print("Action Space Sample", env.action_space.sample()) # Take a random action
```
-The action Space (from [Jeffrey Y Mo](https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet)):
-
-
+- `achieved_goal`: (x,y,z) position of the goal.
+- `desired_goal`: (x,y,z) distance between the goal position and the current object position.
+- `observation`: position (x,y,z) and velocity of the end-effector (vx, vy, vz).
+Given it's a dictionary as observation, **we will need to use a MultiInputPolicy policy instead of MlpPolicy**.
```python
print("\n _____ACTION SPACE_____ \n")
print("The Action Space is: ", a_size)
-print("Action Space Sample", env.action_space.sample()) # Take a random action
+print("Action Space Sample", env.action_space.sample()) # Take a random action
```
-The action Space (from [Jeffrey Y Mo](https://hackmd.io/@jeffreymo/SJJrSJh5_#PyBullet)):
-
- +The action space is a vector with 3 values:
+- Control x, y, z movement
### Normalize observation and rewards
@@ -196,13 +203,11 @@ env = # TODO: Add the wrapper
```python
env = make_vec_env(env_id, n_envs=4)
-env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.0)
+env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
```
### Create the A2C Model 🤖
-In this case, because we have a vector of 28 values as input, we'll use an MLP (multi-layer perceptron) as policy.
-
For more information about A2C implementation with StableBaselines3 check: https://stable-baselines3.readthedocs.io/en/master/modules/a2c.html#notes
To find the best parameters I checked the [official trained agents by Stable-Baselines3 team](https://huggingface.co/sb3).
@@ -214,86 +219,71 @@ model = # Create the A2C model and try to find the best parameters
#### Solution
```python
-model = A2C(
- policy="MlpPolicy",
- env=env,
- gae_lambda=0.9,
- gamma=0.99,
- learning_rate=0.00096,
- max_grad_norm=0.5,
- n_steps=8,
- vf_coef=0.4,
- ent_coef=0.0,
- policy_kwargs=dict(log_std_init=-2, ortho_init=False),
- normalize_advantage=False,
- use_rms_prop=True,
- use_sde=True,
- verbose=1,
-)
+model = A2C(policy = "MultiInputPolicy",
+ env = env,
+ verbose=1)
```
### Train the A2C agent 🏃
-- Let's train our agent for 2,000,000 timesteps. Don't forget to use GPU on Colab. It will take approximately ~25-40min
+- Let's train our agent for 1,000,000 timesteps, don't forget to use GPU on Colab. It will take approximately ~25-40min
```python
-model.learn(2_000_000)
+model.learn(1_000_000)
```
```python
# Save the model and VecNormalize statistics when saving the agent
-model.save("a2c-AntBulletEnv-v0")
+model.save("a2c-PandaReachDense-v3")
env.save("vec_normalize.pkl")
```
### Evaluate the agent 📈
-- Now that our agent is trained, we need to **check its performance**.
+
+- Now that's our agent is trained, we need to **check its performance**.
- Stable-Baselines3 provides a method to do that: `evaluate_policy`
-- In my case, I got a mean reward of `2371.90 +/- 16.50`
```python
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
-eval_env = DummyVecEnv([lambda: gym.make("AntBulletEnv-v0")])
+eval_env = DummyVecEnv([lambda: gym.make("PandaReachDense-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
+# We need to override the render_mode
+eval_env.render_mode = "rgb_array"
+
# do not update them at test time
eval_env.training = False
# reward normalization is not needed at test time
eval_env.norm_reward = False
# Load the agent
-model = A2C.load("a2c-AntBulletEnv-v0")
+model = A2C.load("a2c-PandaReachDense-v3")
-mean_reward, std_reward = evaluate_policy(model, env)
+mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
```
-
### Publish your trained model on the Hub 🔥
+
Now that we saw we got good results after the training, we can publish our trained model on the Hub with one line of code.
📚 The libraries documentation 👉 https://github.com/huggingface/huggingface_sb3/tree/main#hugging-face--x-stable-baselines3-v20
-Here's an example of a Model Card (with a PyBullet environment):
-
-
+The action space is a vector with 3 values:
+- Control x, y, z movement
### Normalize observation and rewards
@@ -196,13 +203,11 @@ env = # TODO: Add the wrapper
```python
env = make_vec_env(env_id, n_envs=4)
-env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.0)
+env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
```
### Create the A2C Model 🤖
-In this case, because we have a vector of 28 values as input, we'll use an MLP (multi-layer perceptron) as policy.
-
For more information about A2C implementation with StableBaselines3 check: https://stable-baselines3.readthedocs.io/en/master/modules/a2c.html#notes
To find the best parameters I checked the [official trained agents by Stable-Baselines3 team](https://huggingface.co/sb3).
@@ -214,86 +219,71 @@ model = # Create the A2C model and try to find the best parameters
#### Solution
```python
-model = A2C(
- policy="MlpPolicy",
- env=env,
- gae_lambda=0.9,
- gamma=0.99,
- learning_rate=0.00096,
- max_grad_norm=0.5,
- n_steps=8,
- vf_coef=0.4,
- ent_coef=0.0,
- policy_kwargs=dict(log_std_init=-2, ortho_init=False),
- normalize_advantage=False,
- use_rms_prop=True,
- use_sde=True,
- verbose=1,
-)
+model = A2C(policy = "MultiInputPolicy",
+ env = env,
+ verbose=1)
```
### Train the A2C agent 🏃
-- Let's train our agent for 2,000,000 timesteps. Don't forget to use GPU on Colab. It will take approximately ~25-40min
+- Let's train our agent for 1,000,000 timesteps, don't forget to use GPU on Colab. It will take approximately ~25-40min
```python
-model.learn(2_000_000)
+model.learn(1_000_000)
```
```python
# Save the model and VecNormalize statistics when saving the agent
-model.save("a2c-AntBulletEnv-v0")
+model.save("a2c-PandaReachDense-v3")
env.save("vec_normalize.pkl")
```
### Evaluate the agent 📈
-- Now that our agent is trained, we need to **check its performance**.
+
+- Now that's our agent is trained, we need to **check its performance**.
- Stable-Baselines3 provides a method to do that: `evaluate_policy`
-- In my case, I got a mean reward of `2371.90 +/- 16.50`
```python
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
-eval_env = DummyVecEnv([lambda: gym.make("AntBulletEnv-v0")])
+eval_env = DummyVecEnv([lambda: gym.make("PandaReachDense-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
+# We need to override the render_mode
+eval_env.render_mode = "rgb_array"
+
# do not update them at test time
eval_env.training = False
# reward normalization is not needed at test time
eval_env.norm_reward = False
# Load the agent
-model = A2C.load("a2c-AntBulletEnv-v0")
+model = A2C.load("a2c-PandaReachDense-v3")
-mean_reward, std_reward = evaluate_policy(model, env)
+mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
```
-
### Publish your trained model on the Hub 🔥
+
Now that we saw we got good results after the training, we can publish our trained model on the Hub with one line of code.
📚 The libraries documentation 👉 https://github.com/huggingface/huggingface_sb3/tree/main#hugging-face--x-stable-baselines3-v20
-Here's an example of a Model Card (with a PyBullet environment):
-
- -
By using `package_to_hub`, as we already mentionned in the former units, **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
-- You can **share an agent with the community that others can use** 💾
+- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
-
To be able to share your model with the community there are three more steps to follow:
1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
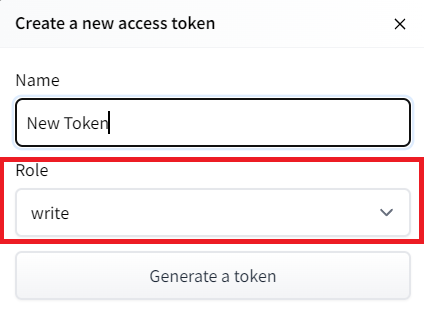
-2️⃣ Sign in and then you need to get your authentication token from the Hugging Face website.
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
-
By using `package_to_hub`, as we already mentionned in the former units, **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
-- You can **share an agent with the community that others can use** 💾
+- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
-
To be able to share your model with the community there are three more steps to follow:
1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
-2️⃣ Sign in and then you need to get your authentication token from the Hugging Face website.
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
 @@ -305,116 +295,68 @@ To be able to share your model with the community there are three more steps to
notebook_login()
!git config --global credential.helper store
```
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-If you don't want to use Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-
-3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function.
+For this environment, **running this cell can take approximately 10min**
```python
+from huggingface_sb3 import package_to_hub
+
package_to_hub(
model=model,
model_name=f"a2c-{env_id}",
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
- repo_id=f"ThomasSimonini/a2c-{env_id}", # Change the username
+ repo_id=f"ThomasSimonini/a2c-{env_id}", # Change the username
commit_message="Initial commit",
)
```
-## Take a coffee break ☕
-- You already trained your first robot that learned to move congratutlations 🥳!
-- It's **time to take a break**. Don't hesitate to **save this notebook** `File > Save a copy to Drive` to work on this second part later.
+## Some additional challenges 🏆
+The best way to learn **is to try things by your own**! Why not trying `PandaPickAndPlace-v3`?
-## Environment 2: PandaReachDense-v2 🦾
+If you want to try more advanced tasks for panda-gym, you need to check what was done using **TQC or SAC** (a more sample-efficient algorithm suited for robotics tasks). In real robotics, you'll use a more sample-efficient algorithm for a simple reason: contrary to a simulation **if you move your robotic arm too much, you have a risk of breaking it**.
-The agent we're going to train is a robotic arm that needs to do controls (moving the arm and using the end-effector).
+PandaPickAndPlace-v1 (this model uses the v1 version of the environment): https://huggingface.co/sb3/tqc-PandaPickAndPlace-v1
-In robotics, the *end-effector* is the device at the end of a robotic arm designed to interact with the environment.
+And don't hesitate to check panda-gym documentation here: https://panda-gym.readthedocs.io/en/latest/usage/train_with_sb3.html
-In `PandaReach`, the robot must place its end-effector at a target position (green ball).
+We provide you the steps to train another agent (optional):
-We're going to use the dense version of this environment. This means we'll get a *dense reward function* that **will provide a reward at each timestep** (the closer the agent is to completing the task, the higher the reward). This is in contrast to a *sparse reward function* where the environment **return a reward if and only if the task is completed**.
-
-Also, we're going to use the *End-effector displacement control*, which means the **action corresponds to the displacement of the end-effector**. We don't control the individual motion of each joint (joint control).
-
-
-
-
-This way **the training will be easier**.
-
-
-
-In `PandaReachDense-v2`, the robotic arm must place its end-effector at a target position (green ball).
-
-
-
-```python
-import gym
-
-env_id = "PandaReachDense-v2"
-
-# Create the env
-env = gym.make(env_id)
-
-# Get the state space and action space
-s_size = env.observation_space.shape
-a_size = env.action_space
-```
-
-```python
-print("_____OBSERVATION SPACE_____ \n")
-print("The State Space is: ", s_size)
-print("Sample observation", env.observation_space.sample()) # Get a random observation
-```
-
-The observation space **is a dictionary with 3 different elements**:
-- `achieved_goal`: (x,y,z) position of the goal.
-- `desired_goal`: (x,y,z) distance between the goal position and the current object position.
-- `observation`: position (x,y,z) and velocity of the end-effector (vx, vy, vz).
-
-Given it's a dictionary as observation, **we will need to use a MultiInputPolicy policy instead of MlpPolicy**.
-
-```python
-print("\n _____ACTION SPACE_____ \n")
-print("The Action Space is: ", a_size)
-print("Action Space Sample", env.action_space.sample()) # Take a random action
-```
-
-The action space is a vector with 3 values:
-- Control x, y, z movement
-
-Now it's your turn:
-
-1. Define the environment called "PandaReachDense-v2".
-2. Make a vectorized environment.
+1. Define the environment called "PandaPickAndPlace-v3"
+2. Make a vectorized environment
3. Add a wrapper to normalize the observations and rewards. [Check the documentation](https://stable-baselines3.readthedocs.io/en/master/guide/vec_envs.html#vecnormalize)
4. Create the A2C Model (don't forget verbose=1 to print the training logs).
-5. Train it for 1M Timesteps.
-6. Save the model and VecNormalize statistics when saving the agent.
-7. Evaluate your agent.
-8. Publish your trained model on the Hub 🔥 with `package_to_hub`.
+5. Train it for 1M Timesteps
+6. Save the model and VecNormalize statistics when saving the agent
+7. Evaluate your agent
+8. Publish your trained model on the Hub 🔥 with `package_to_hub`
-### Solution (fill the todo)
+
+### Solution (optional)
```python
# 1 - 2
-env_id = "PandaReachDense-v2"
+env_id = "PandaPickAndPlace-v3"
env = make_vec_env(env_id, n_envs=4)
# 3
-env = VecNormalize(env, norm_obs=True, norm_reward=False, clip_obs=10.0)
+env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
# 4
-model = A2C(policy="MultiInputPolicy", env=env, verbose=1)
+model = A2C(policy = "MultiInputPolicy",
+ env = env,
+ verbose=1)
# 5
model.learn(1_000_000)
```
```python
# 6
-model_name = "a2c-PandaReachDense-v2"
+model_name = "a2c-PandaPickAndPlace-v3";
model.save(model_name)
env.save("vec_normalize.pkl")
@@ -422,7 +364,7 @@ env.save("vec_normalize.pkl")
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
-eval_env = DummyVecEnv([lambda: gym.make("PandaReachDense-v2")])
+eval_env = DummyVecEnv([lambda: gym.make("PandaPickAndPlace-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
# do not update them at test time
@@ -433,7 +375,7 @@ eval_env.norm_reward = False
# Load the agent
model = A2C.load(model_name)
-mean_reward, std_reward = evaluate_policy(model, env)
+mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
@@ -444,26 +386,11 @@ package_to_hub(
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
- repo_id=f"ThomasSimonini/a2c-{env_id}", # TODO: Change the username
+ repo_id=f"ThomasSimonini/a2c-{env_id}", # TODO: Change the username
commit_message="Initial commit",
)
```
-## Some additional challenges 🏆
-
-The best way to learn **is to try things on your own**! Why not try `HalfCheetahBulletEnv-v0` for PyBullet and `PandaPickAndPlace-v1` for Panda-Gym?
-
-If you want to try more advanced tasks for panda-gym, you need to check what was done using **TQC or SAC** (a more sample-efficient algorithm suited for robotics tasks). In real robotics, you'll use a more sample-efficient algorithm for a simple reason: contrary to a simulation **if you move your robotic arm too much, you have a risk of breaking it**.
-
-PandaPickAndPlace-v1: https://huggingface.co/sb3/tqc-PandaPickAndPlace-v1
-
-And don't hesitate to check panda-gym documentation here: https://panda-gym.readthedocs.io/en/latest/usage/train_with_sb3.html
-
-Here are some ideas to go further:
-* Train more steps
-* Try different hyperparameters by looking at what your classmates have done 👉 https://huggingface.co/models?other=https://huggingface.co/models?other=AntBulletEnv-v0
-* **Push your new trained model** on the Hub 🔥
-
-
See you on Unit 7! 🔥
+
## Keep learning, stay awesome 🤗
diff --git a/units/en/unit6/introduction.mdx b/units/en/unit6/introduction.mdx
index 4be735f..9d4c4ad 100644
--- a/units/en/unit6/introduction.mdx
+++ b/units/en/unit6/introduction.mdx
@@ -16,10 +16,7 @@ So today we'll study **Actor-Critic methods**, a hybrid architecture combining v
- *A Critic* that measures **how good the taken action is** (Value-Based method)
-We'll study one of these hybrid methods, Advantage Actor Critic (A2C), **and train our agent using Stable-Baselines3 in robotic environments**. We'll train two robots:
-- A spider 🕷️ to learn to move.
+We'll study one of these hybrid methods, Advantage Actor Critic (A2C), **and train our agent using Stable-Baselines3 in robotic environments**. We'll train:
- A robotic arm 🦾 to move to the correct position.
-
-
Sound exciting? Let's get started!
@@ -305,116 +295,68 @@ To be able to share your model with the community there are three more steps to
notebook_login()
!git config --global credential.helper store
```
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-If you don't want to use Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-
-3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function.
+For this environment, **running this cell can take approximately 10min**
```python
+from huggingface_sb3 import package_to_hub
+
package_to_hub(
model=model,
model_name=f"a2c-{env_id}",
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
- repo_id=f"ThomasSimonini/a2c-{env_id}", # Change the username
+ repo_id=f"ThomasSimonini/a2c-{env_id}", # Change the username
commit_message="Initial commit",
)
```
-## Take a coffee break ☕
-- You already trained your first robot that learned to move congratutlations 🥳!
-- It's **time to take a break**. Don't hesitate to **save this notebook** `File > Save a copy to Drive` to work on this second part later.
+## Some additional challenges 🏆
+The best way to learn **is to try things by your own**! Why not trying `PandaPickAndPlace-v3`?
-## Environment 2: PandaReachDense-v2 🦾
+If you want to try more advanced tasks for panda-gym, you need to check what was done using **TQC or SAC** (a more sample-efficient algorithm suited for robotics tasks). In real robotics, you'll use a more sample-efficient algorithm for a simple reason: contrary to a simulation **if you move your robotic arm too much, you have a risk of breaking it**.
-The agent we're going to train is a robotic arm that needs to do controls (moving the arm and using the end-effector).
+PandaPickAndPlace-v1 (this model uses the v1 version of the environment): https://huggingface.co/sb3/tqc-PandaPickAndPlace-v1
-In robotics, the *end-effector* is the device at the end of a robotic arm designed to interact with the environment.
+And don't hesitate to check panda-gym documentation here: https://panda-gym.readthedocs.io/en/latest/usage/train_with_sb3.html
-In `PandaReach`, the robot must place its end-effector at a target position (green ball).
+We provide you the steps to train another agent (optional):
-We're going to use the dense version of this environment. This means we'll get a *dense reward function* that **will provide a reward at each timestep** (the closer the agent is to completing the task, the higher the reward). This is in contrast to a *sparse reward function* where the environment **return a reward if and only if the task is completed**.
-
-Also, we're going to use the *End-effector displacement control*, which means the **action corresponds to the displacement of the end-effector**. We don't control the individual motion of each joint (joint control).
-
-
-
-
-This way **the training will be easier**.
-
-
-
-In `PandaReachDense-v2`, the robotic arm must place its end-effector at a target position (green ball).
-
-
-
-```python
-import gym
-
-env_id = "PandaReachDense-v2"
-
-# Create the env
-env = gym.make(env_id)
-
-# Get the state space and action space
-s_size = env.observation_space.shape
-a_size = env.action_space
-```
-
-```python
-print("_____OBSERVATION SPACE_____ \n")
-print("The State Space is: ", s_size)
-print("Sample observation", env.observation_space.sample()) # Get a random observation
-```
-
-The observation space **is a dictionary with 3 different elements**:
-- `achieved_goal`: (x,y,z) position of the goal.
-- `desired_goal`: (x,y,z) distance between the goal position and the current object position.
-- `observation`: position (x,y,z) and velocity of the end-effector (vx, vy, vz).
-
-Given it's a dictionary as observation, **we will need to use a MultiInputPolicy policy instead of MlpPolicy**.
-
-```python
-print("\n _____ACTION SPACE_____ \n")
-print("The Action Space is: ", a_size)
-print("Action Space Sample", env.action_space.sample()) # Take a random action
-```
-
-The action space is a vector with 3 values:
-- Control x, y, z movement
-
-Now it's your turn:
-
-1. Define the environment called "PandaReachDense-v2".
-2. Make a vectorized environment.
+1. Define the environment called "PandaPickAndPlace-v3"
+2. Make a vectorized environment
3. Add a wrapper to normalize the observations and rewards. [Check the documentation](https://stable-baselines3.readthedocs.io/en/master/guide/vec_envs.html#vecnormalize)
4. Create the A2C Model (don't forget verbose=1 to print the training logs).
-5. Train it for 1M Timesteps.
-6. Save the model and VecNormalize statistics when saving the agent.
-7. Evaluate your agent.
-8. Publish your trained model on the Hub 🔥 with `package_to_hub`.
+5. Train it for 1M Timesteps
+6. Save the model and VecNormalize statistics when saving the agent
+7. Evaluate your agent
+8. Publish your trained model on the Hub 🔥 with `package_to_hub`
-### Solution (fill the todo)
+
+### Solution (optional)
```python
# 1 - 2
-env_id = "PandaReachDense-v2"
+env_id = "PandaPickAndPlace-v3"
env = make_vec_env(env_id, n_envs=4)
# 3
-env = VecNormalize(env, norm_obs=True, norm_reward=False, clip_obs=10.0)
+env = VecNormalize(env, norm_obs=True, norm_reward=True, clip_obs=10.)
# 4
-model = A2C(policy="MultiInputPolicy", env=env, verbose=1)
+model = A2C(policy = "MultiInputPolicy",
+ env = env,
+ verbose=1)
# 5
model.learn(1_000_000)
```
```python
# 6
-model_name = "a2c-PandaReachDense-v2"
+model_name = "a2c-PandaPickAndPlace-v3";
model.save(model_name)
env.save("vec_normalize.pkl")
@@ -422,7 +364,7 @@ env.save("vec_normalize.pkl")
from stable_baselines3.common.vec_env import DummyVecEnv, VecNormalize
# Load the saved statistics
-eval_env = DummyVecEnv([lambda: gym.make("PandaReachDense-v2")])
+eval_env = DummyVecEnv([lambda: gym.make("PandaPickAndPlace-v3")])
eval_env = VecNormalize.load("vec_normalize.pkl", eval_env)
# do not update them at test time
@@ -433,7 +375,7 @@ eval_env.norm_reward = False
# Load the agent
model = A2C.load(model_name)
-mean_reward, std_reward = evaluate_policy(model, env)
+mean_reward, std_reward = evaluate_policy(model, eval_env)
print(f"Mean reward = {mean_reward:.2f} +/- {std_reward:.2f}")
@@ -444,26 +386,11 @@ package_to_hub(
model_architecture="A2C",
env_id=env_id,
eval_env=eval_env,
- repo_id=f"ThomasSimonini/a2c-{env_id}", # TODO: Change the username
+ repo_id=f"ThomasSimonini/a2c-{env_id}", # TODO: Change the username
commit_message="Initial commit",
)
```
-## Some additional challenges 🏆
-
-The best way to learn **is to try things on your own**! Why not try `HalfCheetahBulletEnv-v0` for PyBullet and `PandaPickAndPlace-v1` for Panda-Gym?
-
-If you want to try more advanced tasks for panda-gym, you need to check what was done using **TQC or SAC** (a more sample-efficient algorithm suited for robotics tasks). In real robotics, you'll use a more sample-efficient algorithm for a simple reason: contrary to a simulation **if you move your robotic arm too much, you have a risk of breaking it**.
-
-PandaPickAndPlace-v1: https://huggingface.co/sb3/tqc-PandaPickAndPlace-v1
-
-And don't hesitate to check panda-gym documentation here: https://panda-gym.readthedocs.io/en/latest/usage/train_with_sb3.html
-
-Here are some ideas to go further:
-* Train more steps
-* Try different hyperparameters by looking at what your classmates have done 👉 https://huggingface.co/models?other=https://huggingface.co/models?other=AntBulletEnv-v0
-* **Push your new trained model** on the Hub 🔥
-
-
See you on Unit 7! 🔥
+
## Keep learning, stay awesome 🤗
diff --git a/units/en/unit6/introduction.mdx b/units/en/unit6/introduction.mdx
index 4be735f..9d4c4ad 100644
--- a/units/en/unit6/introduction.mdx
+++ b/units/en/unit6/introduction.mdx
@@ -16,10 +16,7 @@ So today we'll study **Actor-Critic methods**, a hybrid architecture combining v
- *A Critic* that measures **how good the taken action is** (Value-Based method)
-We'll study one of these hybrid methods, Advantage Actor Critic (A2C), **and train our agent using Stable-Baselines3 in robotic environments**. We'll train two robots:
-- A spider 🕷️ to learn to move.
+We'll study one of these hybrid methods, Advantage Actor Critic (A2C), **and train our agent using Stable-Baselines3 in robotic environments**. We'll train:
- A robotic arm 🦾 to move to the correct position.
-
-
Sound exciting? Let's get started!