diff --git a/units/en/_toctree.yml b/units/en/_toctree.yml
index 6a79159..34cd6f9 100644
--- a/units/en/_toctree.yml
+++ b/units/en/_toctree.yml
@@ -119,7 +119,9 @@
- local: unit4/advantages-disadvantages
title: The advantages and disadvantages of Policy-based methods
- local: unit4/policy-gradient
- title: Diving deeper into Policy-gradient methods
+ title: Diving deeper into Policy-gradient
+ - local: unit4/pg-theorem
+ title: (Optional) the Policy Gradient Theorem
- local: unit4/hands-on
title: Hands-on
- local: unit4/quiz
diff --git a/units/en/unit4/pg-theorem.mdx b/units/en/unit4/pg-theorem.mdx
new file mode 100644
index 0000000..55eea08
--- /dev/null
+++ b/units/en/unit4/pg-theorem.mdx
@@ -0,0 +1,77 @@
+# (Optional) the Policy Gradient Theorem
+
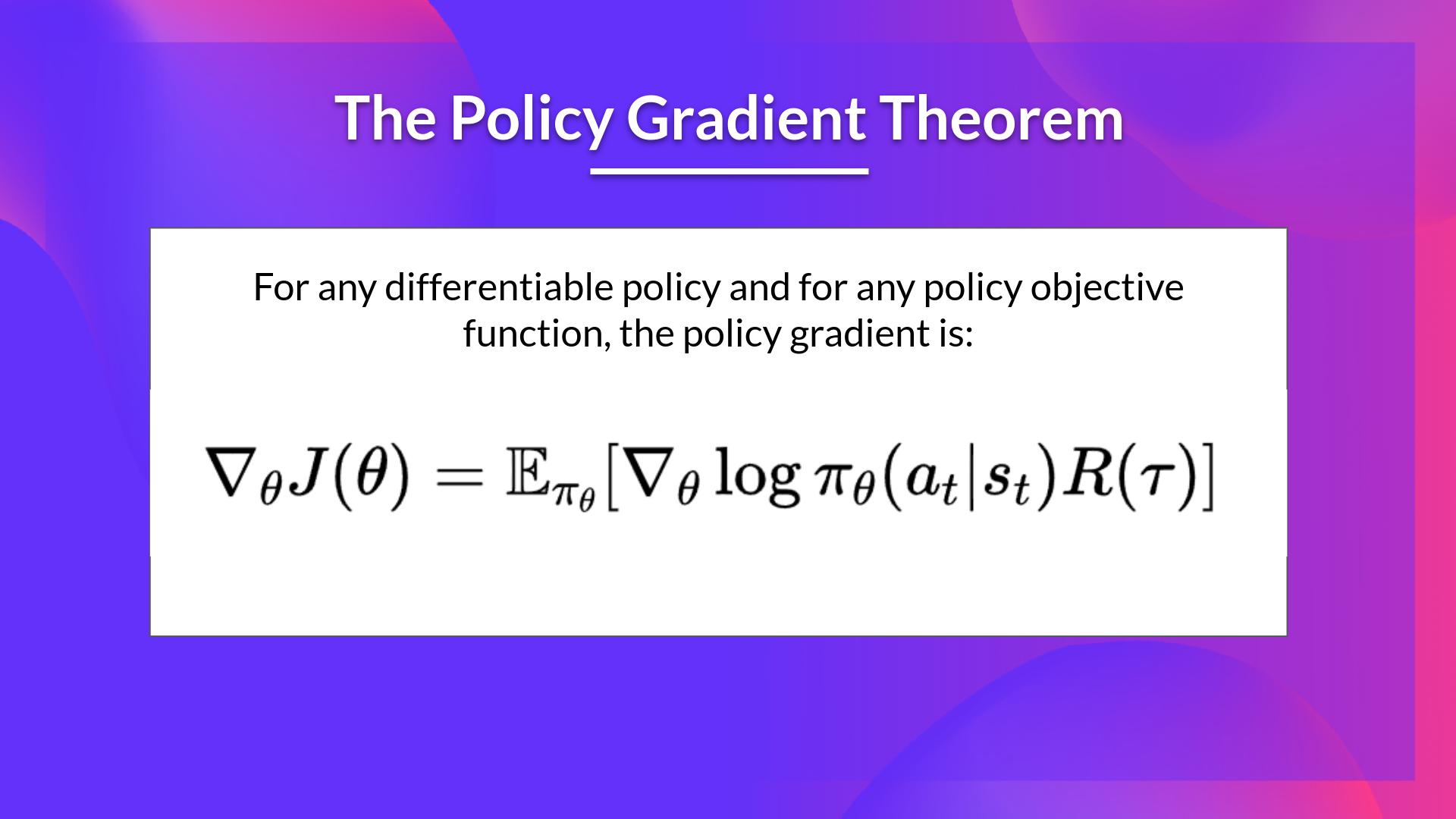
+In this optional section where we're **going to study how we differentiate the objective function that we will use to approximate the policy gradient**.
+
+Let's first recap our different formulas:
+
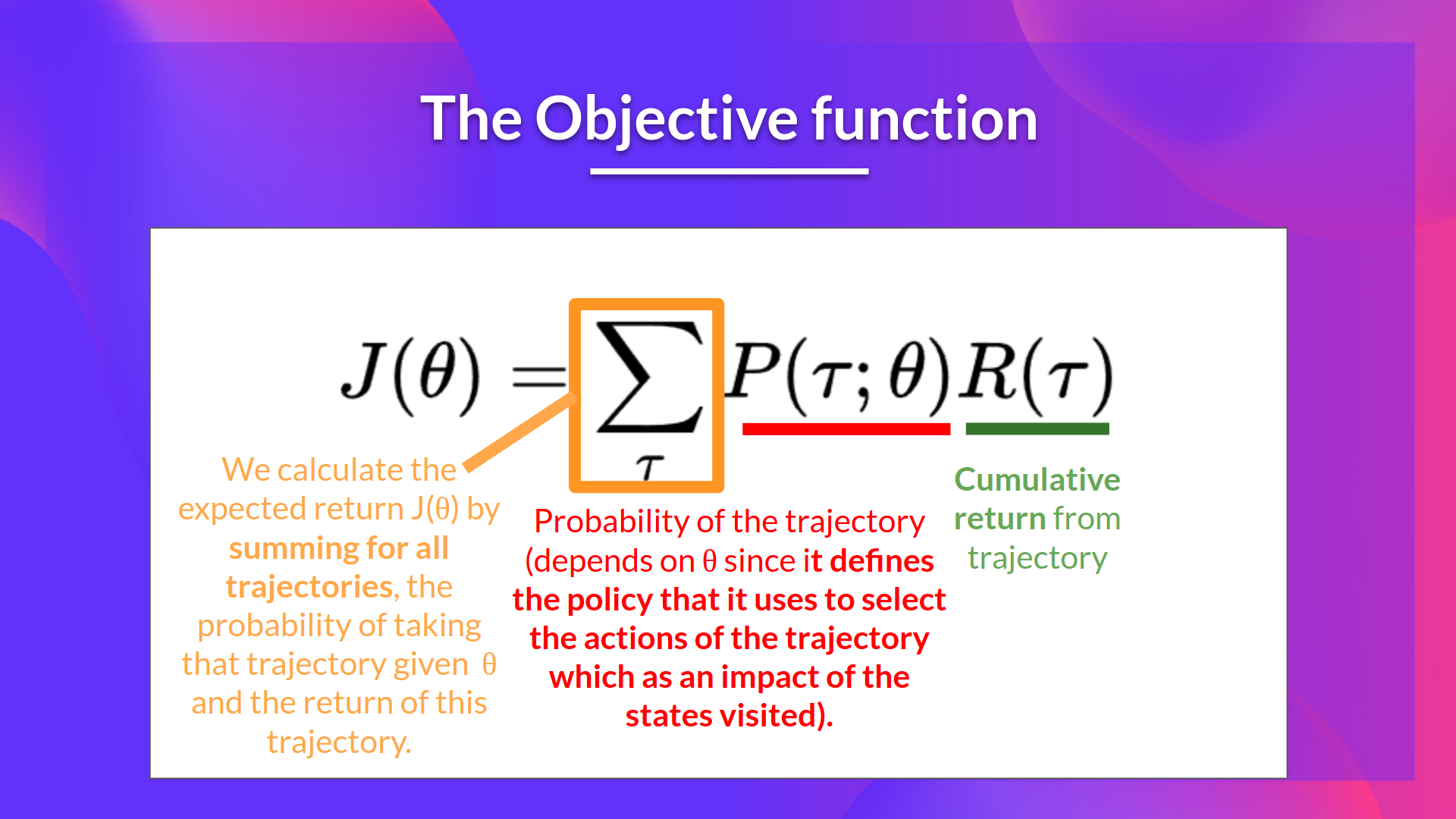
+1. The Objective function
+
+ +
+
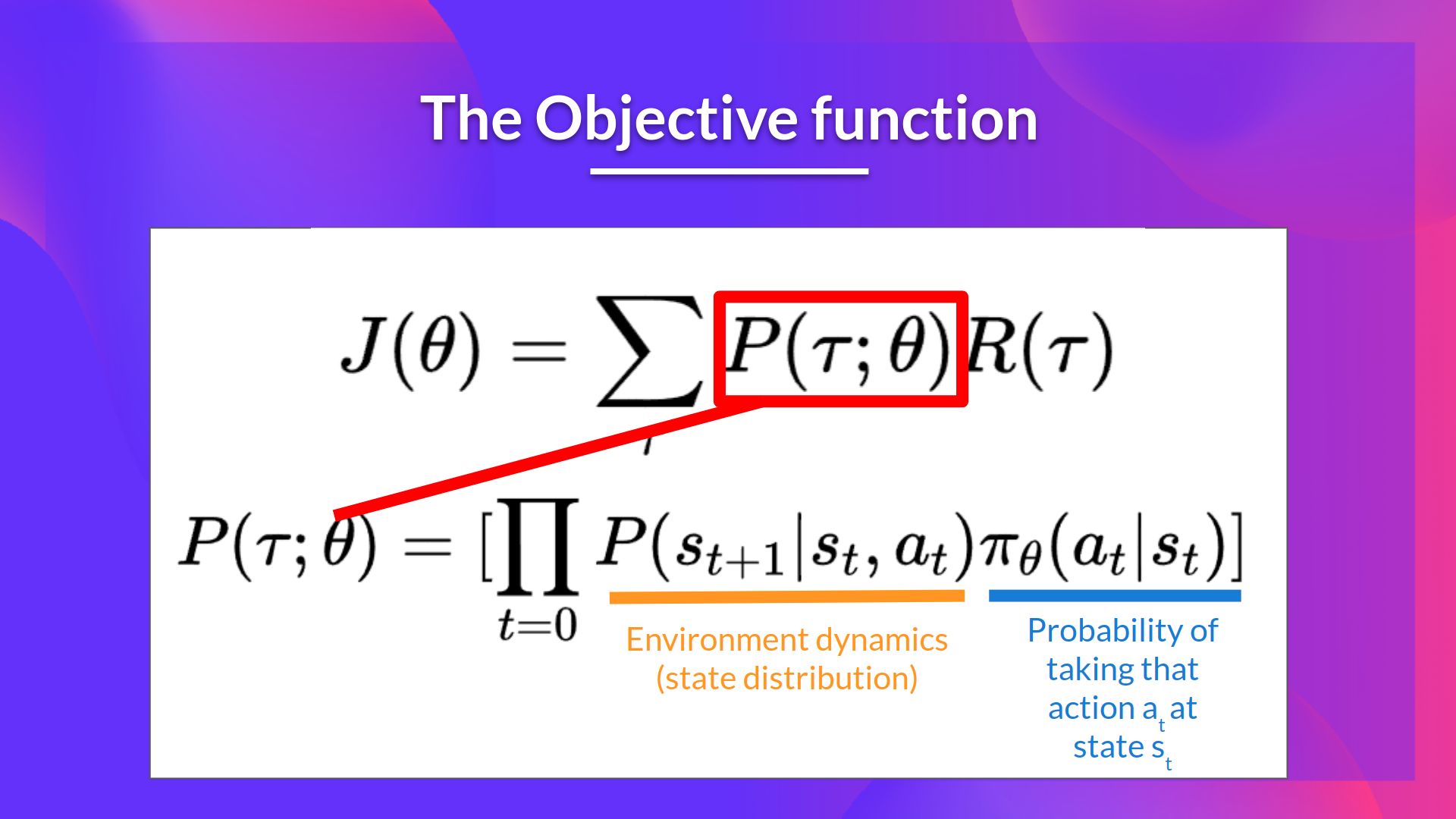
+2. The probability of a trajectory (given that action comes from //(/pi_/theta//)):
+
+
+
+
+2. The probability of a trajectory (given that action comes from //(/pi_/theta//)):
+
+ +
+
+So we have:
+
+\\(\nabla_\theta J(\theta) = \nabla_\theta \sum_{\tau}P(\tau;\theta)R(\tau)\\)
+
+We can rewrite the gradient of the sum as the sum of the gradient:
+
+\\( = \sum_{\tau} \nabla_\theta P(\tau;\theta)R(\tau) \\)
+
+We then multiply every term in the sum by \\(\frac{P(\tau;\theta)}{P(\tau;\theta)}\\)(which is possible since it's = 1)
+
+\\( = \sum_{\tau} \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta)R(\tau) \\)
+
+We can simplify further this since \\( \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta) = P(\tau;\theta)\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\)
+
+\\(= \sum_{\tau} P(\tau;\theta) \frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)}R(\tau) \\)
+
+We can then use the *derivative log trick* (also called *likelihood ratio trick* or *REINFORCE trick*), a simple rule in calculus that implies that \\( \nabla_x log f(x) = \frac{\nabla_x f(x)}{f(x)} \\)
+
+So given we have \\(\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\) we transform it as \\(\nabla_\theta log P(\tau|\theta) \\)
+
+So this is our likelihood policy gradient:
+
+\\( \nabla_\theta J(\theta) = \sum_{\tau} P(\tau;\theta) \nabla_\theta log P(\tau;\theta) R(\tau) \\)
+
+
+Thanks for this new formula, we can estimate the gradient using trajectory samples (we can approximate the likelihood ratio policy gradient with sample-based estimate if you prefer).
+
+\\(\nabla_\theta J(\theta) = \frac{1}{m} \sum^{m}_{i=1} \nabla_\theta log P(\tau^{(i)};\theta)R(\tau^{(i)})\\)
+
+where each \\(\tau(i)}\\) is a sampled trajectory.
+
+But we still have some mathematics work to do there: we need to simplify \\( \nabla_\theta log P(\tau|\theta) \\)
+
+We know that:
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta log[ \mu(s_0) \prod_{t=0}^{H} P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})])\\
+
+Where \\(\mu(s_0)\\) is the initial state distribution and \\( P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \\) is the state transition dynamics of the MDP.
+
+We know that the log of a product is equal to the sum of the logs:
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \left[ \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\right]\\)
+
+We also know that the gradient of the sum is equal to the sum of gradient:
+
+\\( \nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+
+Since neither initial state distribution or state transition dynamics of the MDP are dependent of \\(\theta\\), the derivate of both terms are 0. So we can remove them:
+
+Since:
+\\(\nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) = 0 \\) and (\\ \nabla_\theta \mu(s_0) = 0\\)
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta) = \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\\)
+
+We can rewrite the gradient of the sum as the sum of gradients:
+
+(\\ \nabla_\theta log P(\tau^{(i)};\theta)= \sum_{t=0}^{H} \nabla_\theta log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+
+So, the final formula for estimating the policy gradient is:
+
+\\( \nabla_{\theta} J(\theta) = \hat{g} = \frac{1}{m} \sum^{m}_{i=1} \sum^{H}_{t=0} \nabla_\theta \log \pi_\theta(a^{(i)}_{t} | s_{t}^{(i)})R(\tau^{(i)}) \\)
diff --git a/units/en/unit4/policy-gradient.mdx b/units/en/unit4/policy-gradient.mdx
index fbd0740..0ca624f 100644
--- a/units/en/unit4/policy-gradient.mdx
+++ b/units/en/unit4/policy-gradient.mdx
@@ -88,6 +88,8 @@ Fortunately we're going to use a solution called the Policy Gradient Theorem tha
+
+
+So we have:
+
+\\(\nabla_\theta J(\theta) = \nabla_\theta \sum_{\tau}P(\tau;\theta)R(\tau)\\)
+
+We can rewrite the gradient of the sum as the sum of the gradient:
+
+\\( = \sum_{\tau} \nabla_\theta P(\tau;\theta)R(\tau) \\)
+
+We then multiply every term in the sum by \\(\frac{P(\tau;\theta)}{P(\tau;\theta)}\\)(which is possible since it's = 1)
+
+\\( = \sum_{\tau} \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta)R(\tau) \\)
+
+We can simplify further this since \\( \frac{P(\tau;\theta)}{P(\tau;\theta)}\nabla_\theta P(\tau;\theta) = P(\tau;\theta)\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\)
+
+\\(= \sum_{\tau} P(\tau;\theta) \frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)}R(\tau) \\)
+
+We can then use the *derivative log trick* (also called *likelihood ratio trick* or *REINFORCE trick*), a simple rule in calculus that implies that \\( \nabla_x log f(x) = \frac{\nabla_x f(x)}{f(x)} \\)
+
+So given we have \\(\frac{\nabla_\theta P(\tau;\theta)}{P(\tau;\theta)} \\) we transform it as \\(\nabla_\theta log P(\tau|\theta) \\)
+
+So this is our likelihood policy gradient:
+
+\\( \nabla_\theta J(\theta) = \sum_{\tau} P(\tau;\theta) \nabla_\theta log P(\tau;\theta) R(\tau) \\)
+
+
+Thanks for this new formula, we can estimate the gradient using trajectory samples (we can approximate the likelihood ratio policy gradient with sample-based estimate if you prefer).
+
+\\(\nabla_\theta J(\theta) = \frac{1}{m} \sum^{m}_{i=1} \nabla_\theta log P(\tau^{(i)};\theta)R(\tau^{(i)})\\)
+
+where each \\(\tau(i)}\\) is a sampled trajectory.
+
+But we still have some mathematics work to do there: we need to simplify \\( \nabla_\theta log P(\tau|\theta) \\)
+
+We know that:
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta log[ \mu(s_0) \prod_{t=0}^{H} P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})])\\
+
+Where \\(\mu(s_0)\\) is the initial state distribution and \\( P(s_{t+1}^{(i)}|s_{t}^{(i)}, a_{t}^{(i)}) \\) is the state transition dynamics of the MDP.
+
+We know that the log of a product is equal to the sum of the logs:
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \left[ \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\right]\\)
+
+We also know that the gradient of the sum is equal to the sum of gradient:
+
+\\( \nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+
+Since neither initial state distribution or state transition dynamics of the MDP are dependent of \\(\theta\\), the derivate of both terms are 0. So we can remove them:
+
+Since:
+\\(\nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) = 0 \\) and (\\ \nabla_\theta \mu(s_0) = 0\\)
+
+\\(\nabla_\theta log P(\tau^{(i)};\theta) = \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\\)
+
+We can rewrite the gradient of the sum as the sum of gradients:
+
+(\\ \nabla_\theta log P(\tau^{(i)};\theta)= \sum_{t=0}^{H} \nabla_\theta log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+
+So, the final formula for estimating the policy gradient is:
+
+\\( \nabla_{\theta} J(\theta) = \hat{g} = \frac{1}{m} \sum^{m}_{i=1} \sum^{H}_{t=0} \nabla_\theta \log \pi_\theta(a^{(i)}_{t} | s_{t}^{(i)})R(\tau^{(i)}) \\)
diff --git a/units/en/unit4/policy-gradient.mdx b/units/en/unit4/policy-gradient.mdx
index fbd0740..0ca624f 100644
--- a/units/en/unit4/policy-gradient.mdx
+++ b/units/en/unit4/policy-gradient.mdx
@@ -88,6 +88,8 @@ Fortunately we're going to use a solution called the Policy Gradient Theorem tha
 +If you want to understand how we derivate this formula that we will use to approximate the gradient, check the next (optional) section.
+
## The Reinforce algorithm (Monte Carlo Reinforce)
The Reinforce algorithm also called Monte-Carlo policy-gradient is a policy-gradient algorithm that **uses an estimated return from an entire episode to update the policy parameter** \\(\theta\\):
+If you want to understand how we derivate this formula that we will use to approximate the gradient, check the next (optional) section.
+
## The Reinforce algorithm (Monte Carlo Reinforce)
The Reinforce algorithm also called Monte-Carlo policy-gradient is a policy-gradient algorithm that **uses an estimated return from an entire episode to update the policy parameter** \\(\theta\\):