diff --git a/units/en/_toctree.yml b/units/en/_toctree.yml
index cae3e8a..786e016 100644
--- a/units/en/_toctree.yml
+++ b/units/en/_toctree.yml
@@ -208,6 +208,8 @@
title: Decision Transformers and Offline RL
- local: unitbonus3/language-models
title: Language models in RL
+ - local: unitbonus3/curriculum-learning
+ title: (Automatic) Curriculum Learning for RL
- local: unitbonus3/envs-to-try
title: Interesting environments to try
- local: unitbonus3/godotrl
diff --git a/units/en/unitbonus3/curriculum-learning.mdx b/units/en/unitbonus3/curriculum-learning.mdx
new file mode 100644
index 0000000..4cc49df
--- /dev/null
+++ b/units/en/unitbonus3/curriculum-learning.mdx
@@ -0,0 +1,50 @@
+# (Automatic) Curriculum Learning for RL
+
+While most of the RL methods seen in this course work well in practice, there are some cases where using them alone fails. It is for instance the case where:
+
+- the task to learn is hard and requires an **incremental acquisition of skills** (for instance when one wants to make a bipedal agent learn to go through hard obstacles, it must first learn to stand, then walk, then maybe jump…)
+- there are variations in the environment (that affect the difficulty) and one wants its agent to be **robust** to them
+
+
+
+
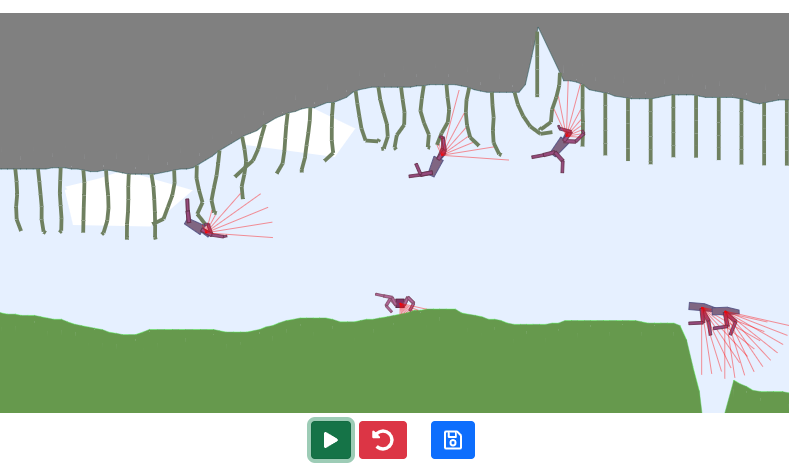
+TeachMyAgent
+
+
+In such cases, it seems needed to propose different tasks to our RL agent and organize them such that it allows the agent to progressively acquire skills. This approach is called **Curriculum Learning** and usually implies a hand-designed curriculum (or set of tasks organized in a specific order). In practice, one can for instance control the generation of the environment, the initial states, or use Self-Play an control the level of opponents proposed to the RL agent.
+
+As designing such a curriculum is not always trivial, the field of **Automatic Curriculum Learning (ACL) proposes to design approaches that learn to create such and organization of tasks in order to maximize the RL agent’s performances**. Portelas et al. proposed to define ACL as:
+
+> … a family of mechanisms that automatically adapt the distribution of training data by learning to adjust the selection of learning situations to the capabilities of RL agents.
+>
+
+As an example, OpenAI used **Domain Randomization** (they applied random variations on the environment) to make a robot hand solve Rubik’s Cubes.
+
+
+
+
+OpenAI - Solving Rubik’s Cube with a Robot Hand
+
+
+Finally, you can play with the robustness of agents trained in the TeachMyAgent benchmark by controlling environment variations or even drawing the terrain 👇
+
+
+
+https://huggingface.co/spaces/flowers-team/Interactive_DeepRL_Demo
+
+
+
+## Further reading
+
+For more information, we recommend you check out the following resources:
+
+### Overview of the field
+
+- [Automatic Curriculum Learning For Deep RL: A Short Survey](https://arxiv.org/pdf/2003.04664.pdf)
+- [Curriculum for Reinforcement Learning](https://lilianweng.github.io/posts/2020-01-29-curriculum-rl/)
+
+### Recent methods
+
+- [Evolving Curricula with Regret-Based Environment Design](https://arxiv.org/abs/2203.01302)
+- [Curriculum Reinforcement Learning via Constrained Optimal Transport](https://proceedings.mlr.press/v162/klink22a.html)
+- [Prioritized Level Replay](https://arxiv.org/abs/2010.03934)
 +
+ +
+ +
+ +
+