diff --git a/units/en/unit3/hands-on.mdx b/units/en/unit3/hands-on.mdx
index c3c156a..eb1c9fc 100644
--- a/units/en/unit3/hands-on.mdx
+++ b/units/en/unit3/hands-on.mdx
@@ -33,46 +33,50 @@ And you can check your progress here 👉 https://huggingface.co/spaces/ThomasSi
[](https://colab.research.google.com/github/huggingface/deep-rl-class/blob/master/notebooks/unit3/unit3.ipynb)
-
# Unit 3: Deep Q-Learning with Atari Games 👾 using RL Baselines3 Zoo
-In this notebook, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning parameters, plotting results and recording videos.
+In this hands-on, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning hyperparameters, plotting results and recording videos.
We're using the [RL-Baselines-3 Zoo integration, a vanilla version of Deep Q-Learning](https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html) with no extensions such as Double-DQN, Dueling-DQN, and Prioritized Experience Replay.
-⬇️ Here is an example of what **you will achieve** ⬇️
-
-```python
-%%html
-
-```
-
### 🎮 Environments:
-- SpacesInvadersNoFrameskip-v4
+- [SpacesInvadersNoFrameskip-v4](https://gymnasium.farama.org/environments/atari/space_invaders/)
+
+You can see the difference between Space Invaders versions here 👉 https://gymnasium.farama.org/environments/atari/space_invaders/#variants
### 📚 RL-Library:
- [RL-Baselines3-Zoo](https://github.com/DLR-RM/rl-baselines3-zoo)
-## Objectives 🏆
-
-At the end of the notebook, you will:
+## Objectives of this hands-on 🏆
+At the end of the hands-on, you will:
- Be able to understand deeper **how RL Baselines3 Zoo works**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
-
## Prerequisites 🏗️
-Before diving into the notebook, you need to:
+
+Before diving into the hands-on, you need to:
🔲 📚 **[Study Deep Q-Learning by reading Unit 3](https://huggingface.co/deep-rl-course/unit3/introduction)** 🤗
-We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
+We're constantly trying to improve our tutorials, so **if you find some issues in this hands-on**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
# Let's train a Deep Q-Learning agent playing Atari' Space Invaders 👾 and upload it to the Hub.
+
+We strongly recommend students **to use Google Colab for the hands-on exercises instead of running them on their personal computers**.
+
+By using Google Colab, **you can focus on learning and experimenting without worrying about the technical aspects of setting up your environments**.
+
+To validate this hands-on for the certification process, you need to push your trained model to the Hub and **get a result of >= 200**.
+
+To find your result, go to the leaderboard and find your model, **the result = mean_reward - std of reward**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
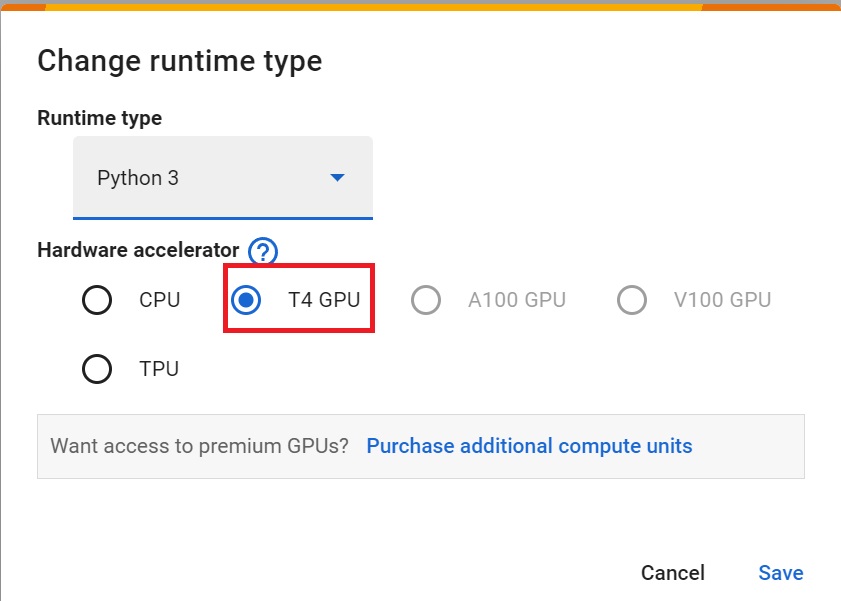
## Set the GPU 💪
- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
@@ -83,11 +87,37 @@ We're constantly trying to improve our tutorials, so **if you find some issues i
+# Install RL-Baselines3 Zoo and its dependencies 📚
+
+If you see `ERROR: pip's dependency resolver does not currently take into account all the packages that are installed.` **this is normal and it's not a critical error** there's a conflict of version. But the packages we need are installed.
+
+```python
+# For now we install this update of RL-Baselines3 Zoo
+pip install git+https://github.com/DLR-RM/rl-baselines3-zoo@update/hf
+```
+
+IF AND ONLY IF THE VERSION ABOVE DOES NOT EXIST ANYMORE. UNCOMMENT AND INSTALL THE ONE BELOW
+
+```python
+#pip install rl_zoo3==2.0.0a9
+```
+
+```bash
+apt-get install swig cmake ffmpeg
+```
+
+To be able to use Atari games in Gymnasium we need to install atari package. And accept-rom-license to download the rom files (games files).
+
+```python
+!pip install gymnasium[atari]
+!pip install gymnasium[accept-rom-license]
+```
+
## Create a virtual display 🔽
-During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+During the hands-on, we'll need to generate a replay video. To do so, if you train it on a headless machine, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
-The following cell will install the librairies and create and run a virtual screen 🖥
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
```bash
apt install python-opengl
@@ -96,14 +126,6 @@ apt install xvfb
pip3 install pyvirtualdisplay
```
-```bash
-apt-get install swig cmake freeglut3-dev
-```
-
-```bash
-pip install pyglet==1.5.1
-```
-
```python
# Virtual display
from pyvirtualdisplay import Display
@@ -112,94 +134,97 @@ virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()
```
-## Clone RL-Baselines3 Zoo Repo 📚
-You could directly install from the Python package (`pip install rl_zoo3`), but since we want **the full installation with extra environments and dependencies**, we're going to clone the `RL-Baselines3-Zoo` repository and install from source.
-
-```bash
-git clone https://github.com/DLR-RM/rl-baselines3-zoo
-```
-
-## Install dependencies 🔽
-We can now install the dependencies RL-Baselines3 Zoo needs (this can take 5min ⏲)
-
-```bash
-cd /content/rl-baselines3-zoo/
-```
-
-```bash
-pip install setuptools==65.5.0
-pip install -r requirements.txt
-# Since colab uses Python 3.9 we need to add this installation
-pip install gym[atari,accept-rom-license]==0.21.0
-```
-
## Train our Deep Q-Learning Agent to Play Space Invaders 👾
To train an agent with RL-Baselines3-Zoo, we just need to do two things:
-1. We define the hyperparameters in `/content/rl-baselines3-zoo/hyperparams/dqn.yml`
-
+1. Create a hyperparameter config file that will contain our training hyperparameters called `dqn.yml`.
+This is a template example:
+
+```
+SpaceInvadersNoFrameskip-v4:
+ env_wrapper:
+ - stable_baselines3.common.atari_wrappers.AtariWrapper
+ frame_stack: 4
+ policy: 'CnnPolicy'
+ n_timesteps: !!float 1e7
+ buffer_size: 100000
+ learning_rate: !!float 1e-4
+ batch_size: 32
+ learning_starts: 100000
+ target_update_interval: 1000
+ train_freq: 4
+ gradient_steps: 1
+ exploration_fraction: 0.1
+ exploration_final_eps: 0.01
+ # If True, you need to deactivate handle_timeout_termination
+ # in the replay_buffer_kwargs
+ optimize_memory_usage: False
+```
Here we see that:
-- We use the `Atari Wrapper` that does the pre-processing (Frame reduction, grayscale, stack four frames),
-- We use the `CnnPolicy`, since we use Convolutional layers to process the frames.
-- We train the model for 10 million `n_timesteps`.
-- Memory (Experience Replay) size is 100000, i.e. the number of experience steps you saved to train again your agent with.
+- We use the `Atari Wrapper` that preprocess the input (Frame reduction ,grayscale, stack 4 frames)
+- We use `CnnPolicy`, since we use Convolutional layers to process the frames
+- We train it for 10 million `n_timesteps`
+- Memory (Experience Replay) size is 100000, aka the amount of experience steps you saved to train again your agent with.
-💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours, which could likely result in Colab timing out. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
+💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
In terms of hyperparameters optimization, my advice is to focus on these 3 hyperparameters:
- `learning_rate`
- `buffer_size (Experience Memory size)`
- `batch_size`
-As a good practice, you need to **check the documentation to understand what each hyperparameter does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
+As a good practice, you need to **check the documentation to understand what each hyperparameters does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
-2. We run `train.py` and save the models on `logs` folder 📁
+2. We start the training and save the models on `logs` folder 📁
+
+- Define the algorithm after `--algo`, where we save the model after `-f` and where the hyperparameter config is after `-c`.
```bash
-python train.py --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________
+python -m rl_zoo3.train --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________ -c _________
```
#### Solution
```bash
-python train.py --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
+python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -c dqn.yml
```
## Let's evaluate our agent 👀
+
- RL-Baselines3-Zoo provides `enjoy.py`, a python script to evaluate our agent. In most RL libraries, we call the evaluation script `enjoy.py`.
- Let's evaluate it for 5000 timesteps 🔥
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
```
#### Solution
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
```
## Publish our trained model on the Hub 🚀
-Now that we saw we got good results after the training, we can publish our trained model to the Hub with one line of code.
+Now that we saw we got good results after the training, we can publish our trained model on the hub 🤗 with one line of code.
-By using `rl_zoo3.push_to_hub.py`, **you evaluate, record a replay, generate a model card of your agent, and push it to the Hub**.
+By using `rl_zoo3.push_to_hub` **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
-- You can **showcase your work** 🔥
+- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
-- You can **share an agent with the community that others can use** 💾
+- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
-To be able to share your model with the community, there are three more steps to follow:
+To be able to share your model with the community there are three more steps to follow:
-1️⃣ (If it's not already done) create an account in HF ➡ https://huggingface.co/join
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
@@ -209,20 +234,23 @@ To be able to share your model with the community, there are three more steps to
- Copy the token
- Run the cell below and past the token
-```python
+```bash
from huggingface_hub import notebook_login # To log to our Hugging Face account to be able to upload models to the Hub.
notebook_login()
-git config --global credential.helper store
+!git config --global credential.helper store
```
-If you don't want to use Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-3️⃣ We're now ready to push our trained agent to the Hub 🔥
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥
-Let's run the `push_to_hub.py` file to upload our trained agent to the Hub. There are two important parameters:
+Let's run push_to_hub.py file to upload our trained agent to the Hub.
-* `--repo-name `: The name of the repo
-* `-orga`: Your Hugging Face username
+`--repo-name `: The name of the repo
+
+`-orga`: Your Hugging Face username
+
+`-f`: Where the trained model folder is (in our case `logs`)
@@ -236,6 +264,8 @@ python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --repo-name dqn-SpaceInvadersNoFrameskip-v4 -orga ThomasSimonini -f logs/
```
+###.
+
Congrats 🥳 you've just trained and uploaded your first Deep Q-Learning agent using RL-Baselines-3 Zoo. The script above should have displayed a link to a model repository such as https://huggingface.co/ThomasSimonini/dqn-SpaceInvadersNoFrameskip-v4. When you go to this link, you can:
- See a **video preview of your agent** at the right.
@@ -249,7 +279,7 @@ Under the hood, the Hub uses git-based repositories (don't worry if you don't kn
## Load a powerful trained model 🔥
-The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**. You can download them and use them to see how they perform!
+- The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**.
You can find them here: 👉 https://huggingface.co/sb3
@@ -261,10 +291,6 @@ Some examples:
Let's load an agent playing Beam Rider: https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4
-```python
-
-```
-
1. We download the model using `rl_zoo3.load_from_hub`, and place it in a new folder that we can call `rl_trained`
```bash
@@ -275,19 +301,19 @@ python -m rl_zoo3.load_from_hub --algo dqn --env BeamRiderNoFrameskip-v4 -orga s
2. Let's evaluate if for 5000 timesteps
```bash
-python enjoy.py --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/
+python -m rl_zoo3.enjoy --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/ --no-render
```
-Why not try training your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
+Why not trying to train your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
-If you want to try, check out https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters. There, **in the model card, you'll find the hyperparameters of the trained agent.**
+If you want to try, check https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters **in the model card, you have the hyperparameters of the trained agent.**
-Finding hyperparameters in general can be a daunting task. Fortunately, we'll see in the next bonus Unit how we can **use Optuna for optimizing the Hyperparameters 🔥.**
+But finding hyperparameters can be a daunting task. Fortunately, we'll see in the next Unit, how we can **use Optuna for optimizing the Hyperparameters 🔥.**
## Some additional challenges 🏆
-The best way to learn **is to try things on your own**!
+The best way to learn **is to try things by your own**!
In the [Leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) you will find your agents. Can you get to the top?
@@ -297,18 +323,25 @@ Here's a list of environments you can try to train your agent with:
- EnduroNoFrameskip-v4
- PongNoFrameskip-v4
-Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at the CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
+Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
________________________________________________________________________
Congrats on finishing this chapter!
-If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who study RL.**
+If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who studied RL.**
-Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and have a solid foundations.
+Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and having a solid foundations.
-In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical tasks in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical task in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+
+
+### This is a course built with you 👷🏿♀️
+
+Finally, we want to improve and update the course iteratively with your feedback. If you have some, please fill this form 👉 https://forms.gle/3HgA7bEHwAmmLfwh9
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
See you on Bonus unit 2! 🔥
 -In this notebook, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning parameters, plotting results and recording videos.
+In this hands-on, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning hyperparameters, plotting results and recording videos.
We're using the [RL-Baselines-3 Zoo integration, a vanilla version of Deep Q-Learning](https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html) with no extensions such as Double-DQN, Dueling-DQN, and Prioritized Experience Replay.
-⬇️ Here is an example of what **you will achieve** ⬇️
-
-```python
-%%html
-
-```
-
### 🎮 Environments:
-- SpacesInvadersNoFrameskip-v4
+- [SpacesInvadersNoFrameskip-v4](https://gymnasium.farama.org/environments/atari/space_invaders/)
+
+You can see the difference between Space Invaders versions here 👉 https://gymnasium.farama.org/environments/atari/space_invaders/#variants
### 📚 RL-Library:
- [RL-Baselines3-Zoo](https://github.com/DLR-RM/rl-baselines3-zoo)
-## Objectives 🏆
-
-At the end of the notebook, you will:
+## Objectives of this hands-on 🏆
+At the end of the hands-on, you will:
- Be able to understand deeper **how RL Baselines3 Zoo works**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
-
## Prerequisites 🏗️
-Before diving into the notebook, you need to:
+
+Before diving into the hands-on, you need to:
🔲 📚 **[Study Deep Q-Learning by reading Unit 3](https://huggingface.co/deep-rl-course/unit3/introduction)** 🤗
-We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
+We're constantly trying to improve our tutorials, so **if you find some issues in this hands-on**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
# Let's train a Deep Q-Learning agent playing Atari' Space Invaders 👾 and upload it to the Hub.
+
+We strongly recommend students **to use Google Colab for the hands-on exercises instead of running them on their personal computers**.
+
+By using Google Colab, **you can focus on learning and experimenting without worrying about the technical aspects of setting up your environments**.
+
+To validate this hands-on for the certification process, you need to push your trained model to the Hub and **get a result of >= 200**.
+
+To find your result, go to the leaderboard and find your model, **the result = mean_reward - std of reward**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
## Set the GPU 💪
- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
@@ -83,11 +87,37 @@ We're constantly trying to improve our tutorials, so **if you find some issues i
-In this notebook, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning parameters, plotting results and recording videos.
+In this hands-on, **you'll train a Deep Q-Learning agent** playing Space Invaders using [RL Baselines3 Zoo](https://github.com/DLR-RM/rl-baselines3-zoo), a training framework based on [Stable-Baselines3](https://stable-baselines3.readthedocs.io/en/master/) that provides scripts for training, evaluating agents, tuning hyperparameters, plotting results and recording videos.
We're using the [RL-Baselines-3 Zoo integration, a vanilla version of Deep Q-Learning](https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html) with no extensions such as Double-DQN, Dueling-DQN, and Prioritized Experience Replay.
-⬇️ Here is an example of what **you will achieve** ⬇️
-
-```python
-%%html
-
-```
-
### 🎮 Environments:
-- SpacesInvadersNoFrameskip-v4
+- [SpacesInvadersNoFrameskip-v4](https://gymnasium.farama.org/environments/atari/space_invaders/)
+
+You can see the difference between Space Invaders versions here 👉 https://gymnasium.farama.org/environments/atari/space_invaders/#variants
### 📚 RL-Library:
- [RL-Baselines3-Zoo](https://github.com/DLR-RM/rl-baselines3-zoo)
-## Objectives 🏆
-
-At the end of the notebook, you will:
+## Objectives of this hands-on 🏆
+At the end of the hands-on, you will:
- Be able to understand deeper **how RL Baselines3 Zoo works**.
- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
-
## Prerequisites 🏗️
-Before diving into the notebook, you need to:
+
+Before diving into the hands-on, you need to:
🔲 📚 **[Study Deep Q-Learning by reading Unit 3](https://huggingface.co/deep-rl-course/unit3/introduction)** 🤗
-We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
+We're constantly trying to improve our tutorials, so **if you find some issues in this hands-on**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
# Let's train a Deep Q-Learning agent playing Atari' Space Invaders 👾 and upload it to the Hub.
+
+We strongly recommend students **to use Google Colab for the hands-on exercises instead of running them on their personal computers**.
+
+By using Google Colab, **you can focus on learning and experimenting without worrying about the technical aspects of setting up your environments**.
+
+To validate this hands-on for the certification process, you need to push your trained model to the Hub and **get a result of >= 200**.
+
+To find your result, go to the leaderboard and find your model, **the result = mean_reward - std of reward**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
## Set the GPU 💪
- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
@@ -83,11 +87,37 @@ We're constantly trying to improve our tutorials, so **if you find some issues i
 +# Install RL-Baselines3 Zoo and its dependencies 📚
+
+If you see `ERROR: pip's dependency resolver does not currently take into account all the packages that are installed.` **this is normal and it's not a critical error** there's a conflict of version. But the packages we need are installed.
+
+```python
+# For now we install this update of RL-Baselines3 Zoo
+pip install git+https://github.com/DLR-RM/rl-baselines3-zoo@update/hf
+```
+
+IF AND ONLY IF THE VERSION ABOVE DOES NOT EXIST ANYMORE. UNCOMMENT AND INSTALL THE ONE BELOW
+
+```python
+#pip install rl_zoo3==2.0.0a9
+```
+
+```bash
+apt-get install swig cmake ffmpeg
+```
+
+To be able to use Atari games in Gymnasium we need to install atari package. And accept-rom-license to download the rom files (games files).
+
+```python
+!pip install gymnasium[atari]
+!pip install gymnasium[accept-rom-license]
+```
+
## Create a virtual display 🔽
-During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+During the hands-on, we'll need to generate a replay video. To do so, if you train it on a headless machine, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
-The following cell will install the librairies and create and run a virtual screen 🖥
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
```bash
apt install python-opengl
@@ -96,14 +126,6 @@ apt install xvfb
pip3 install pyvirtualdisplay
```
-```bash
-apt-get install swig cmake freeglut3-dev
-```
-
-```bash
-pip install pyglet==1.5.1
-```
-
```python
# Virtual display
from pyvirtualdisplay import Display
@@ -112,94 +134,97 @@ virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()
```
-## Clone RL-Baselines3 Zoo Repo 📚
-You could directly install from the Python package (`pip install rl_zoo3`), but since we want **the full installation with extra environments and dependencies**, we're going to clone the `RL-Baselines3-Zoo` repository and install from source.
-
-```bash
-git clone https://github.com/DLR-RM/rl-baselines3-zoo
-```
-
-## Install dependencies 🔽
-We can now install the dependencies RL-Baselines3 Zoo needs (this can take 5min ⏲)
-
-```bash
-cd /content/rl-baselines3-zoo/
-```
-
-```bash
-pip install setuptools==65.5.0
-pip install -r requirements.txt
-# Since colab uses Python 3.9 we need to add this installation
-pip install gym[atari,accept-rom-license]==0.21.0
-```
-
## Train our Deep Q-Learning Agent to Play Space Invaders 👾
To train an agent with RL-Baselines3-Zoo, we just need to do two things:
-1. We define the hyperparameters in `/content/rl-baselines3-zoo/hyperparams/dqn.yml`
-
+# Install RL-Baselines3 Zoo and its dependencies 📚
+
+If you see `ERROR: pip's dependency resolver does not currently take into account all the packages that are installed.` **this is normal and it's not a critical error** there's a conflict of version. But the packages we need are installed.
+
+```python
+# For now we install this update of RL-Baselines3 Zoo
+pip install git+https://github.com/DLR-RM/rl-baselines3-zoo@update/hf
+```
+
+IF AND ONLY IF THE VERSION ABOVE DOES NOT EXIST ANYMORE. UNCOMMENT AND INSTALL THE ONE BELOW
+
+```python
+#pip install rl_zoo3==2.0.0a9
+```
+
+```bash
+apt-get install swig cmake ffmpeg
+```
+
+To be able to use Atari games in Gymnasium we need to install atari package. And accept-rom-license to download the rom files (games files).
+
+```python
+!pip install gymnasium[atari]
+!pip install gymnasium[accept-rom-license]
+```
+
## Create a virtual display 🔽
-During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+During the hands-on, we'll need to generate a replay video. To do so, if you train it on a headless machine, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
-The following cell will install the librairies and create and run a virtual screen 🖥
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
```bash
apt install python-opengl
@@ -96,14 +126,6 @@ apt install xvfb
pip3 install pyvirtualdisplay
```
-```bash
-apt-get install swig cmake freeglut3-dev
-```
-
-```bash
-pip install pyglet==1.5.1
-```
-
```python
# Virtual display
from pyvirtualdisplay import Display
@@ -112,94 +134,97 @@ virtual_display = Display(visible=0, size=(1400, 900))
virtual_display.start()
```
-## Clone RL-Baselines3 Zoo Repo 📚
-You could directly install from the Python package (`pip install rl_zoo3`), but since we want **the full installation with extra environments and dependencies**, we're going to clone the `RL-Baselines3-Zoo` repository and install from source.
-
-```bash
-git clone https://github.com/DLR-RM/rl-baselines3-zoo
-```
-
-## Install dependencies 🔽
-We can now install the dependencies RL-Baselines3 Zoo needs (this can take 5min ⏲)
-
-```bash
-cd /content/rl-baselines3-zoo/
-```
-
-```bash
-pip install setuptools==65.5.0
-pip install -r requirements.txt
-# Since colab uses Python 3.9 we need to add this installation
-pip install gym[atari,accept-rom-license]==0.21.0
-```
-
## Train our Deep Q-Learning Agent to Play Space Invaders 👾
To train an agent with RL-Baselines3-Zoo, we just need to do two things:
-1. We define the hyperparameters in `/content/rl-baselines3-zoo/hyperparams/dqn.yml`
- +1. Create a hyperparameter config file that will contain our training hyperparameters called `dqn.yml`.
+This is a template example:
+
+```
+SpaceInvadersNoFrameskip-v4:
+ env_wrapper:
+ - stable_baselines3.common.atari_wrappers.AtariWrapper
+ frame_stack: 4
+ policy: 'CnnPolicy'
+ n_timesteps: !!float 1e7
+ buffer_size: 100000
+ learning_rate: !!float 1e-4
+ batch_size: 32
+ learning_starts: 100000
+ target_update_interval: 1000
+ train_freq: 4
+ gradient_steps: 1
+ exploration_fraction: 0.1
+ exploration_final_eps: 0.01
+ # If True, you need to deactivate handle_timeout_termination
+ # in the replay_buffer_kwargs
+ optimize_memory_usage: False
+```
Here we see that:
-- We use the `Atari Wrapper` that does the pre-processing (Frame reduction, grayscale, stack four frames),
-- We use the `CnnPolicy`, since we use Convolutional layers to process the frames.
-- We train the model for 10 million `n_timesteps`.
-- Memory (Experience Replay) size is 100000, i.e. the number of experience steps you saved to train again your agent with.
+- We use the `Atari Wrapper` that preprocess the input (Frame reduction ,grayscale, stack 4 frames)
+- We use `CnnPolicy`, since we use Convolutional layers to process the frames
+- We train it for 10 million `n_timesteps`
+- Memory (Experience Replay) size is 100000, aka the amount of experience steps you saved to train again your agent with.
-💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours, which could likely result in Colab timing out. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
+💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
In terms of hyperparameters optimization, my advice is to focus on these 3 hyperparameters:
- `learning_rate`
- `buffer_size (Experience Memory size)`
- `batch_size`
-As a good practice, you need to **check the documentation to understand what each hyperparameter does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
+As a good practice, you need to **check the documentation to understand what each hyperparameters does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
-2. We run `train.py` and save the models on `logs` folder 📁
+2. We start the training and save the models on `logs` folder 📁
+
+- Define the algorithm after `--algo`, where we save the model after `-f` and where the hyperparameter config is after `-c`.
```bash
-python train.py --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________
+python -m rl_zoo3.train --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________ -c _________
```
#### Solution
```bash
-python train.py --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
+python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -c dqn.yml
```
## Let's evaluate our agent 👀
+
- RL-Baselines3-Zoo provides `enjoy.py`, a python script to evaluate our agent. In most RL libraries, we call the evaluation script `enjoy.py`.
- Let's evaluate it for 5000 timesteps 🔥
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
```
#### Solution
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
```
## Publish our trained model on the Hub 🚀
-Now that we saw we got good results after the training, we can publish our trained model to the Hub with one line of code.
+Now that we saw we got good results after the training, we can publish our trained model on the hub 🤗 with one line of code.
+1. Create a hyperparameter config file that will contain our training hyperparameters called `dqn.yml`.
+This is a template example:
+
+```
+SpaceInvadersNoFrameskip-v4:
+ env_wrapper:
+ - stable_baselines3.common.atari_wrappers.AtariWrapper
+ frame_stack: 4
+ policy: 'CnnPolicy'
+ n_timesteps: !!float 1e7
+ buffer_size: 100000
+ learning_rate: !!float 1e-4
+ batch_size: 32
+ learning_starts: 100000
+ target_update_interval: 1000
+ train_freq: 4
+ gradient_steps: 1
+ exploration_fraction: 0.1
+ exploration_final_eps: 0.01
+ # If True, you need to deactivate handle_timeout_termination
+ # in the replay_buffer_kwargs
+ optimize_memory_usage: False
+```
Here we see that:
-- We use the `Atari Wrapper` that does the pre-processing (Frame reduction, grayscale, stack four frames),
-- We use the `CnnPolicy`, since we use Convolutional layers to process the frames.
-- We train the model for 10 million `n_timesteps`.
-- Memory (Experience Replay) size is 100000, i.e. the number of experience steps you saved to train again your agent with.
+- We use the `Atari Wrapper` that preprocess the input (Frame reduction ,grayscale, stack 4 frames)
+- We use `CnnPolicy`, since we use Convolutional layers to process the frames
+- We train it for 10 million `n_timesteps`
+- Memory (Experience Replay) size is 100000, aka the amount of experience steps you saved to train again your agent with.
-💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours, which could likely result in Colab timing out. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
+💡 My advice is to **reduce the training timesteps to 1M,** which will take about 90 minutes on a P100. `!nvidia-smi` will tell you what GPU you're using. At 10 million steps, this will take about 9 hours. I recommend running this on your local computer (or somewhere else). Just click on: `File>Download`.
In terms of hyperparameters optimization, my advice is to focus on these 3 hyperparameters:
- `learning_rate`
- `buffer_size (Experience Memory size)`
- `batch_size`
-As a good practice, you need to **check the documentation to understand what each hyperparameter does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
+As a good practice, you need to **check the documentation to understand what each hyperparameters does**: https://stable-baselines3.readthedocs.io/en/master/modules/dqn.html#parameters
-2. We run `train.py` and save the models on `logs` folder 📁
+2. We start the training and save the models on `logs` folder 📁
+
+- Define the algorithm after `--algo`, where we save the model after `-f` and where the hyperparameter config is after `-c`.
```bash
-python train.py --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________
+python -m rl_zoo3.train --algo ________ --env SpaceInvadersNoFrameskip-v4 -f _________ -c _________
```
#### Solution
```bash
-python train.py --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/
+python -m rl_zoo3.train --algo dqn --env SpaceInvadersNoFrameskip-v4 -f logs/ -c dqn.yml
```
## Let's evaluate our agent 👀
+
- RL-Baselines3-Zoo provides `enjoy.py`, a python script to evaluate our agent. In most RL libraries, we call the evaluation script `enjoy.py`.
- Let's evaluate it for 5000 timesteps 🔥
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps _________ --folder logs/
```
#### Solution
```bash
-python enjoy.py --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
+python -m rl_zoo3.enjoy --algo dqn --env SpaceInvadersNoFrameskip-v4 --no-render --n-timesteps 5000 --folder logs/
```
## Publish our trained model on the Hub 🚀
-Now that we saw we got good results after the training, we can publish our trained model to the Hub with one line of code.
+Now that we saw we got good results after the training, we can publish our trained model on the hub 🤗 with one line of code.
 -By using `rl_zoo3.push_to_hub.py`, **you evaluate, record a replay, generate a model card of your agent, and push it to the Hub**.
+By using `rl_zoo3.push_to_hub` **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
-- You can **showcase your work** 🔥
+- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
-- You can **share an agent with the community that others can use** 💾
+- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
-To be able to share your model with the community, there are three more steps to follow:
+To be able to share your model with the community there are three more steps to follow:
-1️⃣ (If it's not already done) create an account in HF ➡ https://huggingface.co/join
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
@@ -209,20 +234,23 @@ To be able to share your model with the community, there are three more steps to
- Copy the token
- Run the cell below and past the token
-```python
+```bash
from huggingface_hub import notebook_login # To log to our Hugging Face account to be able to upload models to the Hub.
notebook_login()
-git config --global credential.helper store
+!git config --global credential.helper store
```
-If you don't want to use Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-3️⃣ We're now ready to push our trained agent to the Hub 🔥
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥
-Let's run the `push_to_hub.py` file to upload our trained agent to the Hub. There are two important parameters:
+Let's run push_to_hub.py file to upload our trained agent to the Hub.
-* `--repo-name `: The name of the repo
-* `-orga`: Your Hugging Face username
+`--repo-name `: The name of the repo
+
+`-orga`: Your Hugging Face username
+
+`-f`: Where the trained model folder is (in our case `logs`)
-By using `rl_zoo3.push_to_hub.py`, **you evaluate, record a replay, generate a model card of your agent, and push it to the Hub**.
+By using `rl_zoo3.push_to_hub` **you evaluate, record a replay, generate a model card of your agent and push it to the hub**.
This way:
-- You can **showcase your work** 🔥
+- You can **showcase our work** 🔥
- You can **visualize your agent playing** 👀
-- You can **share an agent with the community that others can use** 💾
+- You can **share with the community an agent that others can use** 💾
- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
-To be able to share your model with the community, there are three more steps to follow:
+To be able to share your model with the community there are three more steps to follow:
-1️⃣ (If it's not already done) create an account in HF ➡ https://huggingface.co/join
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
- Create a new token (https://huggingface.co/settings/tokens) **with write role**
@@ -209,20 +234,23 @@ To be able to share your model with the community, there are three more steps to
- Copy the token
- Run the cell below and past the token
-```python
+```bash
from huggingface_hub import notebook_login # To log to our Hugging Face account to be able to upload models to the Hub.
notebook_login()
-git config --global credential.helper store
+!git config --global credential.helper store
```
-If you don't want to use Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
-3️⃣ We're now ready to push our trained agent to the Hub 🔥
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥
-Let's run the `push_to_hub.py` file to upload our trained agent to the Hub. There are two important parameters:
+Let's run push_to_hub.py file to upload our trained agent to the Hub.
-* `--repo-name `: The name of the repo
-* `-orga`: Your Hugging Face username
+`--repo-name `: The name of the repo
+
+`-orga`: Your Hugging Face username
+
+`-f`: Where the trained model folder is (in our case `logs`)
 @@ -236,6 +264,8 @@ python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --repo-name dqn-SpaceInvadersNoFrameskip-v4 -orga ThomasSimonini -f logs/
```
+###.
+
Congrats 🥳 you've just trained and uploaded your first Deep Q-Learning agent using RL-Baselines-3 Zoo. The script above should have displayed a link to a model repository such as https://huggingface.co/ThomasSimonini/dqn-SpaceInvadersNoFrameskip-v4. When you go to this link, you can:
- See a **video preview of your agent** at the right.
@@ -249,7 +279,7 @@ Under the hood, the Hub uses git-based repositories (don't worry if you don't kn
## Load a powerful trained model 🔥
-The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**. You can download them and use them to see how they perform!
+- The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**.
You can find them here: 👉 https://huggingface.co/sb3
@@ -261,10 +291,6 @@ Some examples:
Let's load an agent playing Beam Rider: https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4
-```python
-
-```
-
1. We download the model using `rl_zoo3.load_from_hub`, and place it in a new folder that we can call `rl_trained`
```bash
@@ -275,19 +301,19 @@ python -m rl_zoo3.load_from_hub --algo dqn --env BeamRiderNoFrameskip-v4 -orga s
2. Let's evaluate if for 5000 timesteps
```bash
-python enjoy.py --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/
+python -m rl_zoo3.enjoy --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/ --no-render
```
-Why not try training your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
+Why not trying to train your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
-If you want to try, check out https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters. There, **in the model card, you'll find the hyperparameters of the trained agent.**
+If you want to try, check https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters **in the model card, you have the hyperparameters of the trained agent.**
-Finding hyperparameters in general can be a daunting task. Fortunately, we'll see in the next bonus Unit how we can **use Optuna for optimizing the Hyperparameters 🔥.**
+But finding hyperparameters can be a daunting task. Fortunately, we'll see in the next Unit, how we can **use Optuna for optimizing the Hyperparameters 🔥.**
## Some additional challenges 🏆
-The best way to learn **is to try things on your own**!
+The best way to learn **is to try things by your own**!
In the [Leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) you will find your agents. Can you get to the top?
@@ -297,18 +323,25 @@ Here's a list of environments you can try to train your agent with:
- EnduroNoFrameskip-v4
- PongNoFrameskip-v4
-Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at the CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
+Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
@@ -236,6 +264,8 @@ python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --
python -m rl_zoo3.push_to_hub --algo dqn --env SpaceInvadersNoFrameskip-v4 --repo-name dqn-SpaceInvadersNoFrameskip-v4 -orga ThomasSimonini -f logs/
```
+###.
+
Congrats 🥳 you've just trained and uploaded your first Deep Q-Learning agent using RL-Baselines-3 Zoo. The script above should have displayed a link to a model repository such as https://huggingface.co/ThomasSimonini/dqn-SpaceInvadersNoFrameskip-v4. When you go to this link, you can:
- See a **video preview of your agent** at the right.
@@ -249,7 +279,7 @@ Under the hood, the Hub uses git-based repositories (don't worry if you don't kn
## Load a powerful trained model 🔥
-The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**. You can download them and use them to see how they perform!
+- The Stable-Baselines3 team uploaded **more than 150 trained Deep Reinforcement Learning agents on the Hub**.
You can find them here: 👉 https://huggingface.co/sb3
@@ -261,10 +291,6 @@ Some examples:
Let's load an agent playing Beam Rider: https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4
-```python
-
-```
-
1. We download the model using `rl_zoo3.load_from_hub`, and place it in a new folder that we can call `rl_trained`
```bash
@@ -275,19 +301,19 @@ python -m rl_zoo3.load_from_hub --algo dqn --env BeamRiderNoFrameskip-v4 -orga s
2. Let's evaluate if for 5000 timesteps
```bash
-python enjoy.py --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/
+python -m rl_zoo3.enjoy --algo dqn --env BeamRiderNoFrameskip-v4 -n 5000 -f rl_trained/ --no-render
```
-Why not try training your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
+Why not trying to train your own **Deep Q-Learning Agent playing BeamRiderNoFrameskip-v4? 🏆.**
-If you want to try, check out https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters. There, **in the model card, you'll find the hyperparameters of the trained agent.**
+If you want to try, check https://huggingface.co/sb3/dqn-BeamRiderNoFrameskip-v4#hyperparameters **in the model card, you have the hyperparameters of the trained agent.**
-Finding hyperparameters in general can be a daunting task. Fortunately, we'll see in the next bonus Unit how we can **use Optuna for optimizing the Hyperparameters 🔥.**
+But finding hyperparameters can be a daunting task. Fortunately, we'll see in the next Unit, how we can **use Optuna for optimizing the Hyperparameters 🔥.**
## Some additional challenges 🏆
-The best way to learn **is to try things on your own**!
+The best way to learn **is to try things by your own**!
In the [Leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) you will find your agents. Can you get to the top?
@@ -297,18 +323,25 @@ Here's a list of environments you can try to train your agent with:
- EnduroNoFrameskip-v4
- PongNoFrameskip-v4
-Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at the CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
+Also, **if you want to learn to implement Deep Q-Learning by yourself**, you definitely should look at CleanRL implementation: https://github.com/vwxyzjn/cleanrl/blob/master/cleanrl/dqn_atari.py
 ________________________________________________________________________
Congrats on finishing this chapter!
-If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who study RL.**
+If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who studied RL.**
-Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and have a solid foundations.
+Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and having a solid foundations.
-In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical tasks in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical task in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+
+
+### This is a course built with you 👷🏿♀️
+
+Finally, we want to improve and update the course iteratively with your feedback. If you have some, please fill this form 👉 https://forms.gle/3HgA7bEHwAmmLfwh9
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
See you on Bonus unit 2! 🔥
________________________________________________________________________
Congrats on finishing this chapter!
-If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who study RL.**
+If you’re still feel confused with all these elements...it's totally normal! **This was the same for me and for all people who studied RL.**
-Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and have a solid foundations.
+Take time to really **grasp the material before continuing and try the additional challenges**. It’s important to master these elements and having a solid foundations.
-In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical tasks in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+In the next unit, **we’re going to learn about [Optuna](https://optuna.org/)**. One of the most critical task in Deep Reinforcement Learning is to find a good set of training hyperparameters. And Optuna is a library that helps you to automate the search.
+
+
+### This is a course built with you 👷🏿♀️
+
+Finally, we want to improve and update the course iteratively with your feedback. If you have some, please fill this form 👉 https://forms.gle/3HgA7bEHwAmmLfwh9
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the Github Repo](https://github.com/huggingface/deep-rl-class/issues).
See you on Bonus unit 2! 🔥