diff --git a/units/en/unit4/pg-theorem.mdx b/units/en/unit4/pg-theorem.mdx
index 82bae14..9db62d9 100644
--- a/units/en/unit4/pg-theorem.mdx
+++ b/units/en/unit4/pg-theorem.mdx
@@ -60,11 +60,12 @@ Where \\(\mu(s_0)\\) is the initial state distribution and \\( P(s_{t+1}^{(i)}|s
We know that the log of a product is equal to the sum of the logs:
-\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \left[ \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\right]\\)
+\\(\nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \left[log \mu(s_0) + \sum\limits_{t=0}^{H}log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \sum\limits_{t=0}^{H}log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)})\right] \\)
We also know that the gradient of the sum is equal to the sum of gradient:
-\\( \nabla_\theta log P(\tau^{(i)};\theta)= \nabla_\theta \sum_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \nabla_\theta \sum_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+\\( \nabla_\theta log P(\tau^{(i)};\theta)=\nabla_\theta log\mu(s_0) + \nabla_\theta \sum\limits_{t=0}^{H} log P(s_{t+1}^{(i)}|s_{t}^{(i)} a_{t}^{(i)}) + \nabla_\theta \sum\limits_{t=0}^{H} log \pi_\theta(a_{t}^{(i)}|s_{t}^{(i)}) \\)
+
Since neither initial state distribution or state transition dynamics of the MDP are dependent of \\(\theta\\), the derivate of both terms are 0. So we can remove them:
diff --git a/units/en/unit4/policy-gradient.mdx b/units/en/unit4/policy-gradient.mdx
index 341d0f0..f53ac26 100644
--- a/units/en/unit4/policy-gradient.mdx
+++ b/units/en/unit4/policy-gradient.mdx
@@ -58,9 +58,9 @@ Let's detail a little bit more this formula:
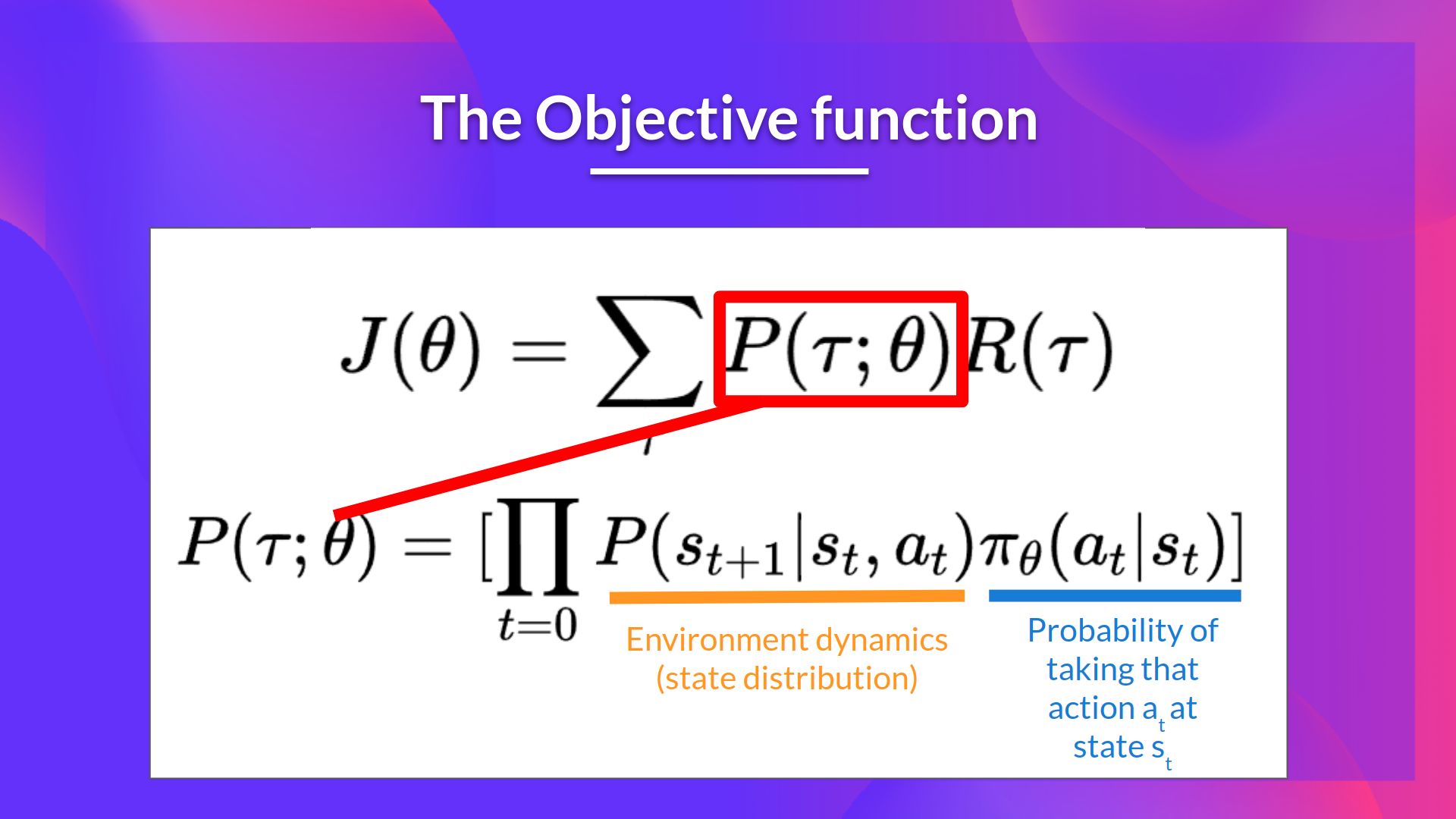 -- \\(J(\theta)\\) : Expected return, we calculate it by summing for all trajectories, the probability of taking that trajectory given $\theta$, and the return of this trajectory.
+- \\(J(\theta)\\) : Expected return, we calculate it by summing for all trajectories, the probability of taking that trajectory given \\(\theta \\), and the return of this trajectory.
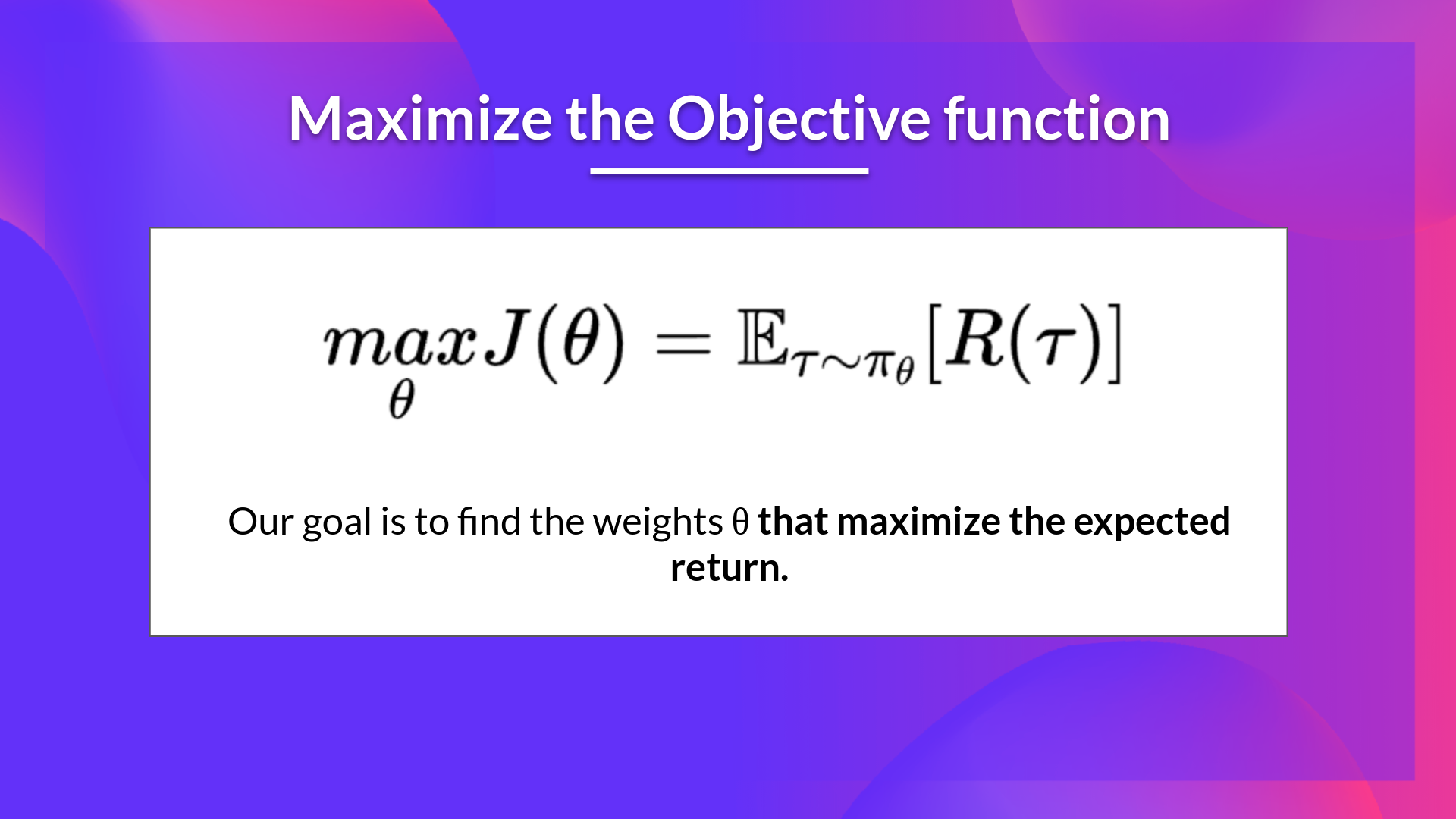
-Our objective then is to maximize the expected cumulative rewards by finding \\(\theta \\) that will output the best action probability distributions:
+Our objective then is to maximize the expected cumulative reward by finding \\(\theta \\) that will output the best action probability distributions:
-- \\(J(\theta)\\) : Expected return, we calculate it by summing for all trajectories, the probability of taking that trajectory given $\theta$, and the return of this trajectory.
+- \\(J(\theta)\\) : Expected return, we calculate it by summing for all trajectories, the probability of taking that trajectory given \\(\theta \\), and the return of this trajectory.
-Our objective then is to maximize the expected cumulative rewards by finding \\(\theta \\) that will output the best action probability distributions:
+Our objective then is to maximize the expected cumulative reward by finding \\(\theta \\) that will output the best action probability distributions: