diff --git a/units/en/unit4/hands-on.mdx b/units/en/unit4/hands-on.mdx
index 38a31d4..1714ddf 100644
--- a/units/en/unit4/hands-on.mdx
+++ b/units/en/unit4/hands-on.mdx
@@ -31,3 +31,982 @@ For more information about the certification process, check this section 👉 ht
**To start the hands-on click on Open In Colab button** 👇 :
[](https://colab.research.google.com/github/huggingface/deep-rl-class/blob/master/notebooks/unit4/unit4.ipynb)
+
+
+# Unit 4: Code your first Deep Reinforcement Learning Algorithm with PyTorch: Reinforce. And test its robustness 💪
+
+ +
+
+In this notebook, you'll code your first Deep Reinforcement Learning algorithm from scratch: Reinforce (also called Monte Carlo Policy Gradient).
+
+Reinforce is a *Policy-based method*: a Deep Reinforcement Learning algorithm that tries **to optimize the policy directly without using an action-value function**.
+
+More precisely, Reinforce is a *Policy-gradient method*, a subclass of *Policy-based methods* that aims **to optimize the policy directly by estimating the weights of the optimal policy using gradient ascent**.
+
+To test its robustness, we're going to train it in 2 different simple environments:
+- Cartpole-v1
+- PixelcopterEnv
+
+⬇️ Here is an example of what **you will achieve at the end of this notebook.** ⬇️
+
+
+
+
+In this notebook, you'll code your first Deep Reinforcement Learning algorithm from scratch: Reinforce (also called Monte Carlo Policy Gradient).
+
+Reinforce is a *Policy-based method*: a Deep Reinforcement Learning algorithm that tries **to optimize the policy directly without using an action-value function**.
+
+More precisely, Reinforce is a *Policy-gradient method*, a subclass of *Policy-based methods* that aims **to optimize the policy directly by estimating the weights of the optimal policy using gradient ascent**.
+
+To test its robustness, we're going to train it in 2 different simple environments:
+- Cartpole-v1
+- PixelcopterEnv
+
+⬇️ Here is an example of what **you will achieve at the end of this notebook.** ⬇️
+
+  +
+
+###🎮 Environments:
+
+- [CartPole-v1](https://www.gymlibrary.dev/environments/classic_control/cart_pole/)
+- [PixelCopter](https://pygame-learning-environment.readthedocs.io/en/latest/user/games/pixelcopter.html)
+
+###📚 RL-Library:
+
+- Python
+- PyTorch
+
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
+
+## Objectives of this notebook 🏆
+At the end of the notebook, you will:
+- Be able to **code from scratch a Reinforce algorithm using PyTorch.**
+- Be able to **test the robustness of your agent using simple environments.**
+- Be able to **push your trained agent to the Hub** with a nice video replay and an evaluation score 🔥.
+
+## Prerequisites 🏗️
+Before diving into the notebook, you need to:
+
+🔲 📚 [Study Policy Gradients by reading Unit 4](https://huggingface.co/deep-rl-course/unit4/introduction)
+
+# Let's code Reinforce algorithm from scratch 🔥
+
+
+To validate this hands-on for the certification process, you need to push your trained models to the Hub.
+
+- Get a result of >= 350 for `Cartpole-v1`.
+- Get a result of >= 5 for `PixelCopter`.
+
+To find your result, go to the leaderboard and find your model, **the result = mean_reward - std of reward**. **If you don't see your model on the leaderboard, go at the bottom of the leaderboard page and click on the refresh button**.
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
+
+## An advice 💡
+
+It's better to run this colab in a copy on your Google Drive, so that **if it timeouts** you still have the saved notebook on your Google Drive and do not need to fill everything from scratch.
+
+To do that you can either do `Ctrl + S` or `File > Save a copy in Google Drive.`
+
+## Set the GPU 💪
+
+- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
+
+
+
+
+###🎮 Environments:
+
+- [CartPole-v1](https://www.gymlibrary.dev/environments/classic_control/cart_pole/)
+- [PixelCopter](https://pygame-learning-environment.readthedocs.io/en/latest/user/games/pixelcopter.html)
+
+###📚 RL-Library:
+
+- Python
+- PyTorch
+
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
+
+## Objectives of this notebook 🏆
+At the end of the notebook, you will:
+- Be able to **code from scratch a Reinforce algorithm using PyTorch.**
+- Be able to **test the robustness of your agent using simple environments.**
+- Be able to **push your trained agent to the Hub** with a nice video replay and an evaluation score 🔥.
+
+## Prerequisites 🏗️
+Before diving into the notebook, you need to:
+
+🔲 📚 [Study Policy Gradients by reading Unit 4](https://huggingface.co/deep-rl-course/unit4/introduction)
+
+# Let's code Reinforce algorithm from scratch 🔥
+
+
+To validate this hands-on for the certification process, you need to push your trained models to the Hub.
+
+- Get a result of >= 350 for `Cartpole-v1`.
+- Get a result of >= 5 for `PixelCopter`.
+
+To find your result, go to the leaderboard and find your model, **the result = mean_reward - std of reward**. **If you don't see your model on the leaderboard, go at the bottom of the leaderboard page and click on the refresh button**.
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
+
+## An advice 💡
+
+It's better to run this colab in a copy on your Google Drive, so that **if it timeouts** you still have the saved notebook on your Google Drive and do not need to fill everything from scratch.
+
+To do that you can either do `Ctrl + S` or `File > Save a copy in Google Drive.`
+
+## Set the GPU 💪
+
+- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
+
+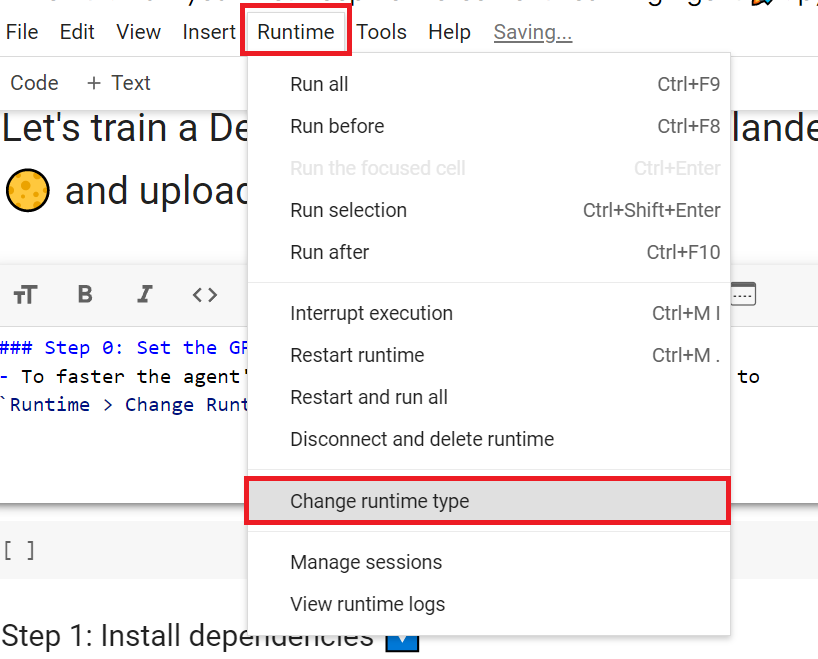 +
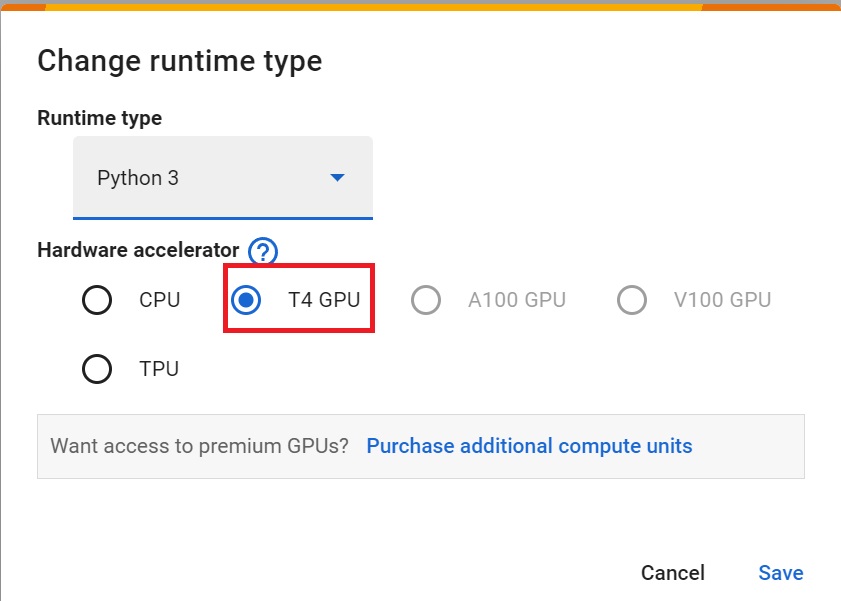
+- `Hardware Accelerator > GPU`
+
+
+
+- `Hardware Accelerator > GPU`
+
+ +
+## Create a virtual display 🖥
+
+During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
+
+```python
+%%capture
+!apt install python-opengl
+!apt install ffmpeg
+!apt install xvfb
+!pip install pyvirtualdisplay
+!pip install pyglet==1.5.1
+```
+
+```python
+# Virtual display
+from pyvirtualdisplay import Display
+
+virtual_display = Display(visible=0, size=(1400, 900))
+virtual_display.start()
+```
+
+## Install the dependencies 🔽
+
+The first step is to install the dependencies. We’ll install multiple ones:
+
+- `gym`
+- `gym-games`: Extra gym environments made with PyGame.
+- `huggingface_hub`: 🤗 works as a central place where anyone can share and explore models and datasets. It has versioning, metrics, visualizations, and other features that will allow you to easily collaborate with others.
+
+You can see here all the Reinforce models available 👉 https://huggingface.co/models?other=reinforce
+
+And you can find all the Deep Reinforcement Learning models here 👉 https://huggingface.co/models?pipeline_tag=reinforcement-learning
+
+
+```python
+!pip install -r https://raw.githubusercontent.com/huggingface/deep-rl-class/main/notebooks/unit4/requirements-unit4.txt
+```
+
+## Import the packages 📦
+
+In addition to import the installed libraries, we also import:
+
+- `imageio`: A library that will help us to generate a replay video
+
+
+
+```python
+import numpy as np
+
+from collections import deque
+
+import matplotlib.pyplot as plt
+%matplotlib inline
+
+# PyTorch
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+from torch.distributions import Categorical
+
+# Gym
+import gym
+import gym_pygame
+
+# Hugging Face Hub
+from huggingface_hub import notebook_login # To log to our Hugging Face account to be able to upload models to the Hub.
+import imageio
+```
+
+## Check if we have a GPU
+
+- Let's check if we have a GPU
+- If it's the case you should see `device:cuda0`
+
+```python
+device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
+```
+
+```python
+print(device)
+```
+
+We're now ready to implement our Reinforce algorithm 🔥
+
+# First agent: Playing CartPole-v1 🤖
+
+## Create the CartPole environment and understand how it works
+
+### [The environment 🎮](https://www.gymlibrary.dev/environments/classic_control/cart_pole/)
+
+### Why do we use a simple environment like CartPole-v1?
+
+As explained in [Reinforcement Learning Tips and Tricks](https://stable-baselines3.readthedocs.io/en/master/guide/rl_tips.html), when you implement your agent from scratch you need **to be sure that it works correctly and find bugs with easy environments before going deeper**. Since finding bugs will be much easier in simple environments.
+
+
+> Try to have some “sign of life” on toy problems
+
+
+> Validate the implementation by making it run on harder and harder envs (you can compare results against the RL zoo). You usually need to run hyperparameter optimization for that step.
+___
+### The CartPole-v1 environment
+
+> A pole is attached by an un-actuated joint to a cart, which moves along a frictionless track. The pendulum is placed upright on the cart and the goal is to balance the pole by applying forces in the left and right direction on the cart.
+
+
+
+So, we start with CartPole-v1. The goal is to push the cart left or right **so that the pole stays in the equilibrium.**
+
+The episode ends if:
+- The pole Angle is greater than ±12°
+- Cart Position is greater than ±2.4
+- Episode length is greater than 500
+
+We get a reward 💰 of +1 every timestep the Pole stays in the equilibrium.
+
+```python
+env_id = "CartPole-v1"
+# Create the env
+env = gym.make(env_id)
+
+# Create the evaluation env
+eval_env = gym.make(env_id)
+
+# Get the state space and action space
+s_size = env.observation_space.shape[0]
+a_size = env.action_space.n
+```
+
+```python
+print("_____OBSERVATION SPACE_____ \n")
+print("The State Space is: ", s_size)
+print("Sample observation", env.observation_space.sample()) # Get a random observation
+```
+
+```python
+print("\n _____ACTION SPACE_____ \n")
+print("The Action Space is: ", a_size)
+print("Action Space Sample", env.action_space.sample()) # Take a random action
+```
+
+## Let's build the Reinforce Architecture
+
+This implementation is based on two implementations:
+- [PyTorch official Reinforcement Learning example](https://github.com/pytorch/examples/blob/main/reinforcement_learning/reinforce.py)
+- [Udacity Reinforce](https://github.com/udacity/deep-reinforcement-learning/blob/master/reinforce/REINFORCE.ipynb)
+- [Improvement of the integration by Chris1nexus](https://github.com/huggingface/deep-rl-class/pull/95)
+
+
+
+## Create a virtual display 🖥
+
+During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
+
+```python
+%%capture
+!apt install python-opengl
+!apt install ffmpeg
+!apt install xvfb
+!pip install pyvirtualdisplay
+!pip install pyglet==1.5.1
+```
+
+```python
+# Virtual display
+from pyvirtualdisplay import Display
+
+virtual_display = Display(visible=0, size=(1400, 900))
+virtual_display.start()
+```
+
+## Install the dependencies 🔽
+
+The first step is to install the dependencies. We’ll install multiple ones:
+
+- `gym`
+- `gym-games`: Extra gym environments made with PyGame.
+- `huggingface_hub`: 🤗 works as a central place where anyone can share and explore models and datasets. It has versioning, metrics, visualizations, and other features that will allow you to easily collaborate with others.
+
+You can see here all the Reinforce models available 👉 https://huggingface.co/models?other=reinforce
+
+And you can find all the Deep Reinforcement Learning models here 👉 https://huggingface.co/models?pipeline_tag=reinforcement-learning
+
+
+```python
+!pip install -r https://raw.githubusercontent.com/huggingface/deep-rl-class/main/notebooks/unit4/requirements-unit4.txt
+```
+
+## Import the packages 📦
+
+In addition to import the installed libraries, we also import:
+
+- `imageio`: A library that will help us to generate a replay video
+
+
+
+```python
+import numpy as np
+
+from collections import deque
+
+import matplotlib.pyplot as plt
+%matplotlib inline
+
+# PyTorch
+import torch
+import torch.nn as nn
+import torch.nn.functional as F
+import torch.optim as optim
+from torch.distributions import Categorical
+
+# Gym
+import gym
+import gym_pygame
+
+# Hugging Face Hub
+from huggingface_hub import notebook_login # To log to our Hugging Face account to be able to upload models to the Hub.
+import imageio
+```
+
+## Check if we have a GPU
+
+- Let's check if we have a GPU
+- If it's the case you should see `device:cuda0`
+
+```python
+device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
+```
+
+```python
+print(device)
+```
+
+We're now ready to implement our Reinforce algorithm 🔥
+
+# First agent: Playing CartPole-v1 🤖
+
+## Create the CartPole environment and understand how it works
+
+### [The environment 🎮](https://www.gymlibrary.dev/environments/classic_control/cart_pole/)
+
+### Why do we use a simple environment like CartPole-v1?
+
+As explained in [Reinforcement Learning Tips and Tricks](https://stable-baselines3.readthedocs.io/en/master/guide/rl_tips.html), when you implement your agent from scratch you need **to be sure that it works correctly and find bugs with easy environments before going deeper**. Since finding bugs will be much easier in simple environments.
+
+
+> Try to have some “sign of life” on toy problems
+
+
+> Validate the implementation by making it run on harder and harder envs (you can compare results against the RL zoo). You usually need to run hyperparameter optimization for that step.
+___
+### The CartPole-v1 environment
+
+> A pole is attached by an un-actuated joint to a cart, which moves along a frictionless track. The pendulum is placed upright on the cart and the goal is to balance the pole by applying forces in the left and right direction on the cart.
+
+
+
+So, we start with CartPole-v1. The goal is to push the cart left or right **so that the pole stays in the equilibrium.**
+
+The episode ends if:
+- The pole Angle is greater than ±12°
+- Cart Position is greater than ±2.4
+- Episode length is greater than 500
+
+We get a reward 💰 of +1 every timestep the Pole stays in the equilibrium.
+
+```python
+env_id = "CartPole-v1"
+# Create the env
+env = gym.make(env_id)
+
+# Create the evaluation env
+eval_env = gym.make(env_id)
+
+# Get the state space and action space
+s_size = env.observation_space.shape[0]
+a_size = env.action_space.n
+```
+
+```python
+print("_____OBSERVATION SPACE_____ \n")
+print("The State Space is: ", s_size)
+print("Sample observation", env.observation_space.sample()) # Get a random observation
+```
+
+```python
+print("\n _____ACTION SPACE_____ \n")
+print("The Action Space is: ", a_size)
+print("Action Space Sample", env.action_space.sample()) # Take a random action
+```
+
+## Let's build the Reinforce Architecture
+
+This implementation is based on two implementations:
+- [PyTorch official Reinforcement Learning example](https://github.com/pytorch/examples/blob/main/reinforcement_learning/reinforce.py)
+- [Udacity Reinforce](https://github.com/udacity/deep-reinforcement-learning/blob/master/reinforce/REINFORCE.ipynb)
+- [Improvement of the integration by Chris1nexus](https://github.com/huggingface/deep-rl-class/pull/95)
+
+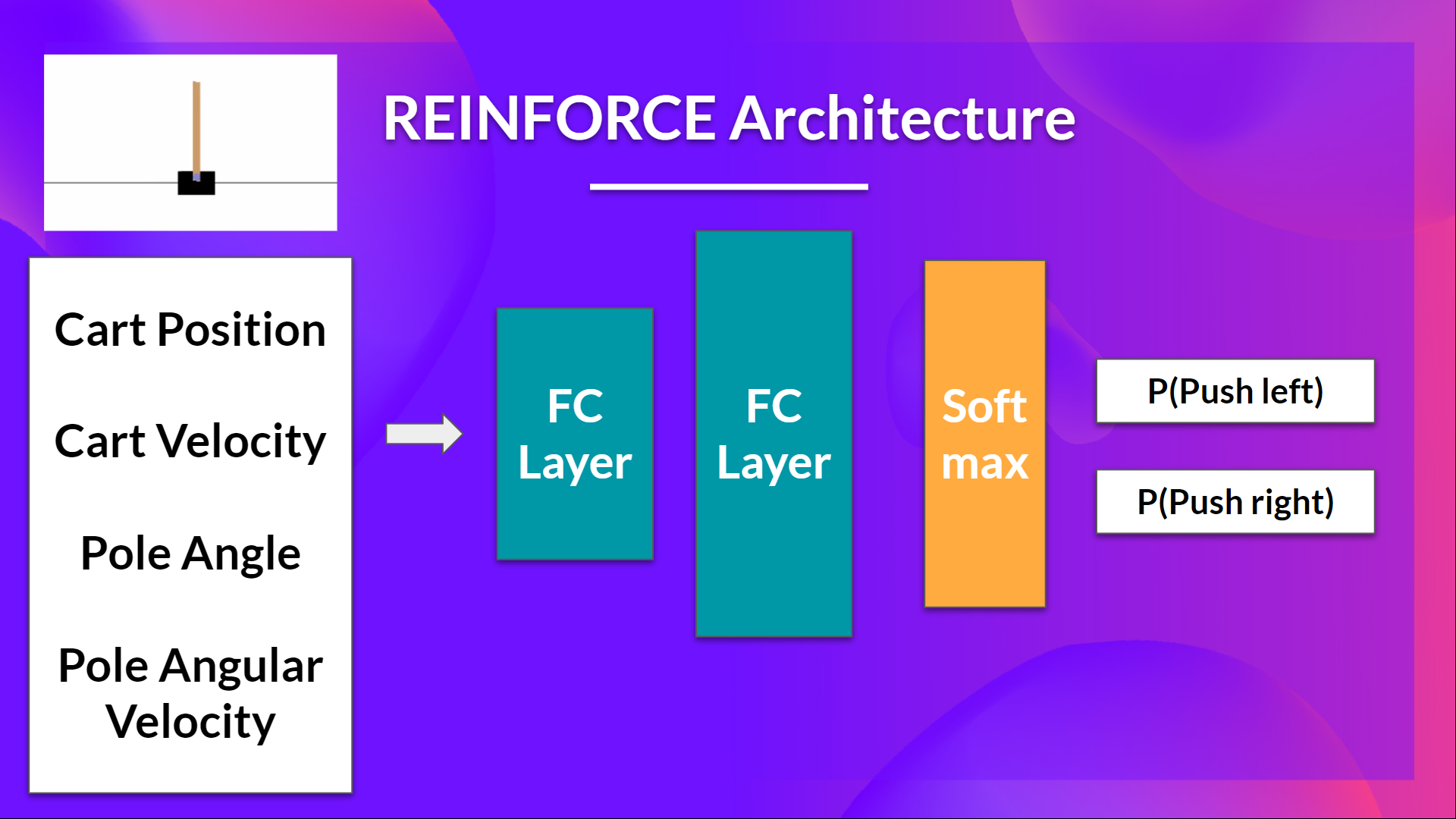 +
+So we want:
+- Two fully connected layers (fc1 and fc2).
+- Using ReLU as activation function of fc1
+- Using Softmax to output a probability distribution over actions
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ # Create two fully connected layers
+
+
+
+ def forward(self, x):
+ # Define the forward pass
+ # state goes to fc1 then we apply ReLU activation function
+
+ # fc1 outputs goes to fc2
+
+ # We output the softmax
+
+ def act(self, state):
+ """
+ Given a state, take action
+ """
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = np.argmax(m)
+ return action.item(), m.log_prob(action)
+```
+
+### Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = self.fc2(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = np.argmax(m)
+ return action.item(), m.log_prob(action)
+```
+
+I make a mistake, can you guess where?
+
+- To find out let's make a forward pass:
+
+```python
+debug_policy = Policy(s_size, a_size, 64).to(device)
+debug_policy.act(env.reset())
+```
+
+- Here we see that the error says `ValueError: The value argument to log_prob must be a Tensor`
+
+- It means that `action` in `m.log_prob(action)` must be a Tensor **but it's not.**
+
+- Do you know why? Check the act function and try to see why it does not work.
+
+Advice 💡: Something is wrong in this implementation. Remember that we act function **we want to sample an action from the probability distribution over actions**.
+
+
+### (Real) Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = self.fc2(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+By using CartPole, it was easier to debug since **we know that the bug comes from our integration and not from our simple environment**.
+
+- Since **we want to sample an action from the probability distribution over actions**, we can't use `action = np.argmax(m)` since it will always output the action that have the highest probability.
+
+- We need to replace with `action = m.sample()` that will sample an action from the probability distribution P(.|s)
+
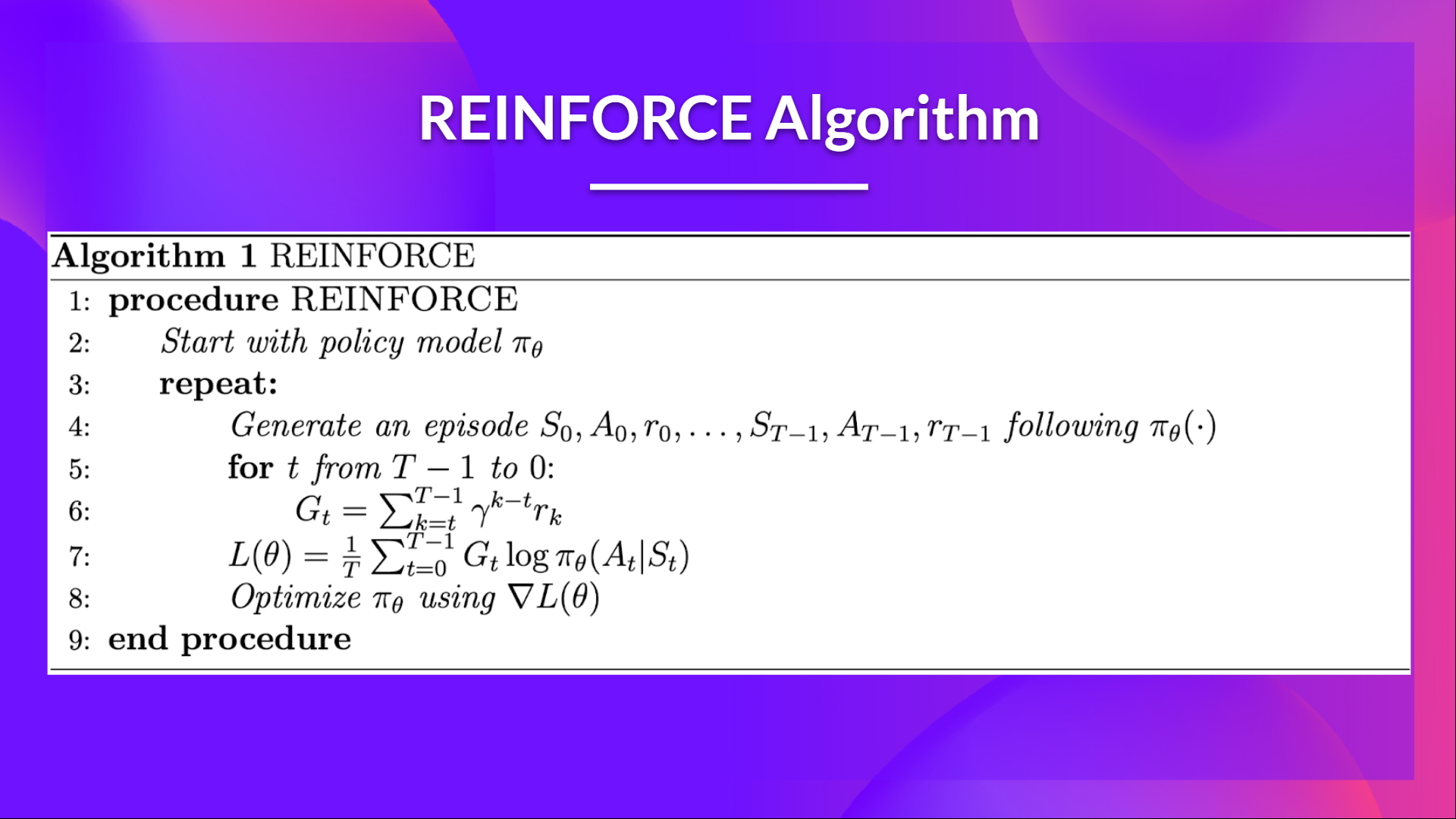
+### Let's build the Reinforce Training Algorithm
+This is the Reinforce algorithm pseudocode:
+
+
+
+So we want:
+- Two fully connected layers (fc1 and fc2).
+- Using ReLU as activation function of fc1
+- Using Softmax to output a probability distribution over actions
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ # Create two fully connected layers
+
+
+
+ def forward(self, x):
+ # Define the forward pass
+ # state goes to fc1 then we apply ReLU activation function
+
+ # fc1 outputs goes to fc2
+
+ # We output the softmax
+
+ def act(self, state):
+ """
+ Given a state, take action
+ """
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = np.argmax(m)
+ return action.item(), m.log_prob(action)
+```
+
+### Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = self.fc2(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = np.argmax(m)
+ return action.item(), m.log_prob(action)
+```
+
+I make a mistake, can you guess where?
+
+- To find out let's make a forward pass:
+
+```python
+debug_policy = Policy(s_size, a_size, 64).to(device)
+debug_policy.act(env.reset())
+```
+
+- Here we see that the error says `ValueError: The value argument to log_prob must be a Tensor`
+
+- It means that `action` in `m.log_prob(action)` must be a Tensor **but it's not.**
+
+- Do you know why? Check the act function and try to see why it does not work.
+
+Advice 💡: Something is wrong in this implementation. Remember that we act function **we want to sample an action from the probability distribution over actions**.
+
+
+### (Real) Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = self.fc2(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+By using CartPole, it was easier to debug since **we know that the bug comes from our integration and not from our simple environment**.
+
+- Since **we want to sample an action from the probability distribution over actions**, we can't use `action = np.argmax(m)` since it will always output the action that have the highest probability.
+
+- We need to replace with `action = m.sample()` that will sample an action from the probability distribution P(.|s)
+
+### Let's build the Reinforce Training Algorithm
+This is the Reinforce algorithm pseudocode:
+
+ +
+
+- When we calculate the return Gt (line 6) we see that we calculate the sum of discounted rewards **starting at timestep t**.
+
+- Why? Because our policy should only **reinforce actions on the basis of the consequences**: so rewards obtained before taking an action are useless (since they were not because of the action), **only the ones that come after the action matters**.
+
+- Before coding this you should read this section [don't let the past distract you](https://spinningup.openai.com/en/latest/spinningup/rl_intro3.html#don-t-let-the-past-distract-you) that explains why we use reward-to-go policy gradient.
+
+We use an interesting technique coded by [Chris1nexus](https://github.com/Chris1nexus) to **compute the return at each timestep efficiently**. The comments explained the procedure. Don't hesitate also [to check the PR explanation](https://github.com/huggingface/deep-rl-class/pull/95)
+But overall the idea is to **compute the return at each timestep efficiently**.
+
+The second question you may ask is **why do we minimize the loss**? You talked about Gradient Ascent not Gradient Descent?
+
+- We want to maximize our utility function $J(\theta)$ but in PyTorch like in Tensorflow it's better to **minimize an objective function.**
+ - So let's say we want to reinforce action 3 at a certain timestep. Before training this action P is 0.25.
+ - So we want to modify $\theta$ such that $\pi_\theta(a_3|s; \theta) > 0.25$
+ - Because all P must sum to 1, max $\pi_\theta(a_3|s; \theta)$ will **minimize other action probability.**
+ - So we should tell PyTorch **to min $1 - \pi_\theta(a_3|s; \theta)$.**
+ - This loss function approaches 0 as $\pi_\theta(a_3|s; \theta)$ nears 1.
+ - So we are encouraging the gradient to max $\pi_\theta(a_3|s; \theta)$
+
+
+```python
+def reinforce(policy, optimizer, n_training_episodes, max_t, gamma, print_every):
+ # Help us to calculate the score during the training
+ scores_deque = deque(maxlen=100)
+ scores = []
+ # Line 3 of pseudocode
+ for i_episode in range(1, n_training_episodes+1):
+ saved_log_probs = []
+ rewards = []
+ state = # TODO: reset the environment
+ # Line 4 of pseudocode
+ for t in range(max_t):
+ action, log_prob = # TODO get the action
+ saved_log_probs.append(log_prob)
+ state, reward, done, _ = # TODO: take an env step
+ rewards.append(reward)
+ if done:
+ break
+ scores_deque.append(sum(rewards))
+ scores.append(sum(rewards))
+
+ # Line 6 of pseudocode: calculate the return
+ returns = deque(maxlen=max_t)
+ n_steps = len(rewards)
+ # Compute the discounted returns at each timestep,
+ # as the sum of the gamma-discounted return at time t (G_t) + the reward at time t
+
+ # In O(N) time, where N is the number of time steps
+ # (this definition of the discounted return G_t follows the definition of this quantity
+ # shown at page 44 of Sutton&Barto 2017 2nd draft)
+ # G_t = r_(t+1) + r_(t+2) + ...
+
+ # Given this formulation, the returns at each timestep t can be computed
+ # by re-using the computed future returns G_(t+1) to compute the current return G_t
+ # G_t = r_(t+1) + gamma*G_(t+1)
+ # G_(t-1) = r_t + gamma* G_t
+ # (this follows a dynamic programming approach, with which we memorize solutions in order
+ # to avoid computing them multiple times)
+
+ # This is correct since the above is equivalent to (see also page 46 of Sutton&Barto 2017 2nd draft)
+ # G_(t-1) = r_t + gamma*r_(t+1) + gamma*gamma*r_(t+2) + ...
+
+
+ ## Given the above, we calculate the returns at timestep t as:
+ # gamma[t] * return[t] + reward[t]
+ #
+ ## We compute this starting from the last timestep to the first, in order
+ ## to employ the formula presented above and avoid redundant computations that would be needed
+ ## if we were to do it from first to last.
+
+ ## Hence, the queue "returns" will hold the returns in chronological order, from t=0 to t=n_steps
+ ## thanks to the appendleft() function which allows to append to the position 0 in constant time O(1)
+ ## a normal python list would instead require O(N) to do this.
+ for t in range(n_steps)[::-1]:
+ disc_return_t = (returns[0] if len(returns)>0 else 0)
+ returns.appendleft( ) # TODO: complete here
+
+ ## standardization of the returns is employed to make training more stable
+ eps = np.finfo(np.float32).eps.item()
+
+ ## eps is the smallest representable float, which is
+ # added to the standard deviation of the returns to avoid numerical instabilities
+ returns = torch.tensor(returns)
+ returns = (returns - returns.mean()) / (returns.std() + eps)
+
+ # Line 7:
+ policy_loss = []
+ for log_prob, disc_return in zip(saved_log_probs, returns):
+ policy_loss.append(-log_prob * disc_return)
+ policy_loss = torch.cat(policy_loss).sum()
+
+ # Line 8: PyTorch prefers gradient descent
+ optimizer.zero_grad()
+ policy_loss.backward()
+ optimizer.step()
+
+ if i_episode % print_every == 0:
+ print('Episode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_deque)))
+
+ return scores
+```
+
+#### Solution
+
+```python
+def reinforce(policy, optimizer, n_training_episodes, max_t, gamma, print_every):
+ # Help us to calculate the score during the training
+ scores_deque = deque(maxlen=100)
+ scores = []
+ # Line 3 of pseudocode
+ for i_episode in range(1, n_training_episodes + 1):
+ saved_log_probs = []
+ rewards = []
+ state = env.reset()
+ # Line 4 of pseudocode
+ for t in range(max_t):
+ action, log_prob = policy.act(state)
+ saved_log_probs.append(log_prob)
+ state, reward, done, _ = env.step(action)
+ rewards.append(reward)
+ if done:
+ break
+ scores_deque.append(sum(rewards))
+ scores.append(sum(rewards))
+
+ # Line 6 of pseudocode: calculate the return
+ returns = deque(maxlen=max_t)
+ n_steps = len(rewards)
+ # Compute the discounted returns at each timestep,
+ # as
+ # the sum of the gamma-discounted return at time t (G_t) + the reward at time t
+ #
+ # In O(N) time, where N is the number of time steps
+ # (this definition of the discounted return G_t follows the definition of this quantity
+ # shown at page 44 of Sutton&Barto 2017 2nd draft)
+ # G_t = r_(t+1) + r_(t+2) + ...
+
+ # Given this formulation, the returns at each timestep t can be computed
+ # by re-using the computed future returns G_(t+1) to compute the current return G_t
+ # G_t = r_(t+1) + gamma*G_(t+1)
+ # G_(t-1) = r_t + gamma* G_t
+ # (this follows a dynamic programming approach, with which we memorize solutions in order
+ # to avoid computing them multiple times)
+
+ # This is correct since the above is equivalent to (see also page 46 of Sutton&Barto 2017 2nd draft)
+ # G_(t-1) = r_t + gamma*r_(t+1) + gamma*gamma*r_(t+2) + ...
+
+ ## Given the above, we calculate the returns at timestep t as:
+ # gamma[t] * return[t] + reward[t]
+ #
+ ## We compute this starting from the last timestep to the first, in order
+ ## to employ the formula presented above and avoid redundant computations that would be needed
+ ## if we were to do it from first to last.
+
+ ## Hence, the queue "returns" will hold the returns in chronological order, from t=0 to t=n_steps
+ ## thanks to the appendleft() function which allows to append to the position 0 in constant time O(1)
+ ## a normal python list would instead require O(N) to do this.
+ for t in range(n_steps)[::-1]:
+ disc_return_t = returns[0] if len(returns) > 0 else 0
+ returns.appendleft(gamma * disc_return_t + rewards[t])
+
+ ## standardization of the returns is employed to make training more stable
+ eps = np.finfo(np.float32).eps.item()
+ ## eps is the smallest representable float, which is
+ # added to the standard deviation of the returns to avoid numerical instabilities
+ returns = torch.tensor(returns)
+ returns = (returns - returns.mean()) / (returns.std() + eps)
+
+ # Line 7:
+ policy_loss = []
+ for log_prob, disc_return in zip(saved_log_probs, returns):
+ policy_loss.append(-log_prob * disc_return)
+ policy_loss = torch.cat(policy_loss).sum()
+
+ # Line 8: PyTorch prefers gradient descent
+ optimizer.zero_grad()
+ policy_loss.backward()
+ optimizer.step()
+
+ if i_episode % print_every == 0:
+ print("Episode {}\tAverage Score: {:.2f}".format(i_episode, np.mean(scores_deque)))
+
+ return scores
+```
+
+## Train it
+- We're now ready to train our agent.
+- But first, we define a variable containing all the training hyperparameters.
+- You can change the training parameters (and should 😉)
+
+```python
+cartpole_hyperparameters = {
+ "h_size": 16,
+ "n_training_episodes": 1000,
+ "n_evaluation_episodes": 10,
+ "max_t": 1000,
+ "gamma": 1.0,
+ "lr": 1e-2,
+ "env_id": env_id,
+ "state_space": s_size,
+ "action_space": a_size,
+}
+```
+
+```python
+# Create policy and place it to the device
+cartpole_policy = Policy(
+ cartpole_hyperparameters["state_space"],
+ cartpole_hyperparameters["action_space"],
+ cartpole_hyperparameters["h_size"],
+).to(device)
+cartpole_optimizer = optim.Adam(cartpole_policy.parameters(), lr=cartpole_hyperparameters["lr"])
+```
+
+```python
+scores = reinforce(
+ cartpole_policy,
+ cartpole_optimizer,
+ cartpole_hyperparameters["n_training_episodes"],
+ cartpole_hyperparameters["max_t"],
+ cartpole_hyperparameters["gamma"],
+ 100,
+)
+```
+
+## Define evaluation method 📝
+- Here we define the evaluation method that we're going to use to test our Reinforce agent.
+
+```python
+def evaluate_agent(env, max_steps, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The Reinforce agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ for step in range(max_steps):
+ action, _ = policy.act(state)
+ new_state, reward, done, info = env.step(action)
+ total_rewards_ep += reward
+
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+```
+
+## Evaluate our agent 📈
+
+```python
+evaluate_agent(
+ eval_env, cartpole_hyperparameters["max_t"], cartpole_hyperparameters["n_evaluation_episodes"], cartpole_policy
+)
+```
+
+### Publish our trained model on the Hub 🔥
+Now that we saw we got good results after the training, we can publish our trained model on the hub 🤗 with one line of code.
+
+Here's an example of a Model Card:
+
+
+
+
+- When we calculate the return Gt (line 6) we see that we calculate the sum of discounted rewards **starting at timestep t**.
+
+- Why? Because our policy should only **reinforce actions on the basis of the consequences**: so rewards obtained before taking an action are useless (since they were not because of the action), **only the ones that come after the action matters**.
+
+- Before coding this you should read this section [don't let the past distract you](https://spinningup.openai.com/en/latest/spinningup/rl_intro3.html#don-t-let-the-past-distract-you) that explains why we use reward-to-go policy gradient.
+
+We use an interesting technique coded by [Chris1nexus](https://github.com/Chris1nexus) to **compute the return at each timestep efficiently**. The comments explained the procedure. Don't hesitate also [to check the PR explanation](https://github.com/huggingface/deep-rl-class/pull/95)
+But overall the idea is to **compute the return at each timestep efficiently**.
+
+The second question you may ask is **why do we minimize the loss**? You talked about Gradient Ascent not Gradient Descent?
+
+- We want to maximize our utility function $J(\theta)$ but in PyTorch like in Tensorflow it's better to **minimize an objective function.**
+ - So let's say we want to reinforce action 3 at a certain timestep. Before training this action P is 0.25.
+ - So we want to modify $\theta$ such that $\pi_\theta(a_3|s; \theta) > 0.25$
+ - Because all P must sum to 1, max $\pi_\theta(a_3|s; \theta)$ will **minimize other action probability.**
+ - So we should tell PyTorch **to min $1 - \pi_\theta(a_3|s; \theta)$.**
+ - This loss function approaches 0 as $\pi_\theta(a_3|s; \theta)$ nears 1.
+ - So we are encouraging the gradient to max $\pi_\theta(a_3|s; \theta)$
+
+
+```python
+def reinforce(policy, optimizer, n_training_episodes, max_t, gamma, print_every):
+ # Help us to calculate the score during the training
+ scores_deque = deque(maxlen=100)
+ scores = []
+ # Line 3 of pseudocode
+ for i_episode in range(1, n_training_episodes+1):
+ saved_log_probs = []
+ rewards = []
+ state = # TODO: reset the environment
+ # Line 4 of pseudocode
+ for t in range(max_t):
+ action, log_prob = # TODO get the action
+ saved_log_probs.append(log_prob)
+ state, reward, done, _ = # TODO: take an env step
+ rewards.append(reward)
+ if done:
+ break
+ scores_deque.append(sum(rewards))
+ scores.append(sum(rewards))
+
+ # Line 6 of pseudocode: calculate the return
+ returns = deque(maxlen=max_t)
+ n_steps = len(rewards)
+ # Compute the discounted returns at each timestep,
+ # as the sum of the gamma-discounted return at time t (G_t) + the reward at time t
+
+ # In O(N) time, where N is the number of time steps
+ # (this definition of the discounted return G_t follows the definition of this quantity
+ # shown at page 44 of Sutton&Barto 2017 2nd draft)
+ # G_t = r_(t+1) + r_(t+2) + ...
+
+ # Given this formulation, the returns at each timestep t can be computed
+ # by re-using the computed future returns G_(t+1) to compute the current return G_t
+ # G_t = r_(t+1) + gamma*G_(t+1)
+ # G_(t-1) = r_t + gamma* G_t
+ # (this follows a dynamic programming approach, with which we memorize solutions in order
+ # to avoid computing them multiple times)
+
+ # This is correct since the above is equivalent to (see also page 46 of Sutton&Barto 2017 2nd draft)
+ # G_(t-1) = r_t + gamma*r_(t+1) + gamma*gamma*r_(t+2) + ...
+
+
+ ## Given the above, we calculate the returns at timestep t as:
+ # gamma[t] * return[t] + reward[t]
+ #
+ ## We compute this starting from the last timestep to the first, in order
+ ## to employ the formula presented above and avoid redundant computations that would be needed
+ ## if we were to do it from first to last.
+
+ ## Hence, the queue "returns" will hold the returns in chronological order, from t=0 to t=n_steps
+ ## thanks to the appendleft() function which allows to append to the position 0 in constant time O(1)
+ ## a normal python list would instead require O(N) to do this.
+ for t in range(n_steps)[::-1]:
+ disc_return_t = (returns[0] if len(returns)>0 else 0)
+ returns.appendleft( ) # TODO: complete here
+
+ ## standardization of the returns is employed to make training more stable
+ eps = np.finfo(np.float32).eps.item()
+
+ ## eps is the smallest representable float, which is
+ # added to the standard deviation of the returns to avoid numerical instabilities
+ returns = torch.tensor(returns)
+ returns = (returns - returns.mean()) / (returns.std() + eps)
+
+ # Line 7:
+ policy_loss = []
+ for log_prob, disc_return in zip(saved_log_probs, returns):
+ policy_loss.append(-log_prob * disc_return)
+ policy_loss = torch.cat(policy_loss).sum()
+
+ # Line 8: PyTorch prefers gradient descent
+ optimizer.zero_grad()
+ policy_loss.backward()
+ optimizer.step()
+
+ if i_episode % print_every == 0:
+ print('Episode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_deque)))
+
+ return scores
+```
+
+#### Solution
+
+```python
+def reinforce(policy, optimizer, n_training_episodes, max_t, gamma, print_every):
+ # Help us to calculate the score during the training
+ scores_deque = deque(maxlen=100)
+ scores = []
+ # Line 3 of pseudocode
+ for i_episode in range(1, n_training_episodes + 1):
+ saved_log_probs = []
+ rewards = []
+ state = env.reset()
+ # Line 4 of pseudocode
+ for t in range(max_t):
+ action, log_prob = policy.act(state)
+ saved_log_probs.append(log_prob)
+ state, reward, done, _ = env.step(action)
+ rewards.append(reward)
+ if done:
+ break
+ scores_deque.append(sum(rewards))
+ scores.append(sum(rewards))
+
+ # Line 6 of pseudocode: calculate the return
+ returns = deque(maxlen=max_t)
+ n_steps = len(rewards)
+ # Compute the discounted returns at each timestep,
+ # as
+ # the sum of the gamma-discounted return at time t (G_t) + the reward at time t
+ #
+ # In O(N) time, where N is the number of time steps
+ # (this definition of the discounted return G_t follows the definition of this quantity
+ # shown at page 44 of Sutton&Barto 2017 2nd draft)
+ # G_t = r_(t+1) + r_(t+2) + ...
+
+ # Given this formulation, the returns at each timestep t can be computed
+ # by re-using the computed future returns G_(t+1) to compute the current return G_t
+ # G_t = r_(t+1) + gamma*G_(t+1)
+ # G_(t-1) = r_t + gamma* G_t
+ # (this follows a dynamic programming approach, with which we memorize solutions in order
+ # to avoid computing them multiple times)
+
+ # This is correct since the above is equivalent to (see also page 46 of Sutton&Barto 2017 2nd draft)
+ # G_(t-1) = r_t + gamma*r_(t+1) + gamma*gamma*r_(t+2) + ...
+
+ ## Given the above, we calculate the returns at timestep t as:
+ # gamma[t] * return[t] + reward[t]
+ #
+ ## We compute this starting from the last timestep to the first, in order
+ ## to employ the formula presented above and avoid redundant computations that would be needed
+ ## if we were to do it from first to last.
+
+ ## Hence, the queue "returns" will hold the returns in chronological order, from t=0 to t=n_steps
+ ## thanks to the appendleft() function which allows to append to the position 0 in constant time O(1)
+ ## a normal python list would instead require O(N) to do this.
+ for t in range(n_steps)[::-1]:
+ disc_return_t = returns[0] if len(returns) > 0 else 0
+ returns.appendleft(gamma * disc_return_t + rewards[t])
+
+ ## standardization of the returns is employed to make training more stable
+ eps = np.finfo(np.float32).eps.item()
+ ## eps is the smallest representable float, which is
+ # added to the standard deviation of the returns to avoid numerical instabilities
+ returns = torch.tensor(returns)
+ returns = (returns - returns.mean()) / (returns.std() + eps)
+
+ # Line 7:
+ policy_loss = []
+ for log_prob, disc_return in zip(saved_log_probs, returns):
+ policy_loss.append(-log_prob * disc_return)
+ policy_loss = torch.cat(policy_loss).sum()
+
+ # Line 8: PyTorch prefers gradient descent
+ optimizer.zero_grad()
+ policy_loss.backward()
+ optimizer.step()
+
+ if i_episode % print_every == 0:
+ print("Episode {}\tAverage Score: {:.2f}".format(i_episode, np.mean(scores_deque)))
+
+ return scores
+```
+
+## Train it
+- We're now ready to train our agent.
+- But first, we define a variable containing all the training hyperparameters.
+- You can change the training parameters (and should 😉)
+
+```python
+cartpole_hyperparameters = {
+ "h_size": 16,
+ "n_training_episodes": 1000,
+ "n_evaluation_episodes": 10,
+ "max_t": 1000,
+ "gamma": 1.0,
+ "lr": 1e-2,
+ "env_id": env_id,
+ "state_space": s_size,
+ "action_space": a_size,
+}
+```
+
+```python
+# Create policy and place it to the device
+cartpole_policy = Policy(
+ cartpole_hyperparameters["state_space"],
+ cartpole_hyperparameters["action_space"],
+ cartpole_hyperparameters["h_size"],
+).to(device)
+cartpole_optimizer = optim.Adam(cartpole_policy.parameters(), lr=cartpole_hyperparameters["lr"])
+```
+
+```python
+scores = reinforce(
+ cartpole_policy,
+ cartpole_optimizer,
+ cartpole_hyperparameters["n_training_episodes"],
+ cartpole_hyperparameters["max_t"],
+ cartpole_hyperparameters["gamma"],
+ 100,
+)
+```
+
+## Define evaluation method 📝
+- Here we define the evaluation method that we're going to use to test our Reinforce agent.
+
+```python
+def evaluate_agent(env, max_steps, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The Reinforce agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ for step in range(max_steps):
+ action, _ = policy.act(state)
+ new_state, reward, done, info = env.step(action)
+ total_rewards_ep += reward
+
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+```
+
+## Evaluate our agent 📈
+
+```python
+evaluate_agent(
+ eval_env, cartpole_hyperparameters["max_t"], cartpole_hyperparameters["n_evaluation_episodes"], cartpole_policy
+)
+```
+
+### Publish our trained model on the Hub 🔥
+Now that we saw we got good results after the training, we can publish our trained model on the hub 🤗 with one line of code.
+
+Here's an example of a Model Card:
+
+ +
+### Push to the Hub
+#### Do not modify this code
+
+```python
+from huggingface_hub import HfApi, snapshot_download
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import json
+import imageio
+
+import os
+```
+
+```python
+def record_video(env, policy, out_directory, fps=30):
+ """
+ Generate a replay video of the agent
+ :param env
+ :param Qtable: Qtable of our agent
+ :param out_directory
+ :param fps: how many frame per seconds (with taxi-v3 and frozenlake-v1 we use 1)
+ """
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _ = policy.act(state)
+ state, reward, done, info = env.step(action) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+```
+
+```python
+def push_to_hub(repo_id, model, hyperparameters, eval_env, video_fps=30, local_repo_path="hub"):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the Hub
+
+ :param repo_id: repo_id: id of the model repository from the Hugging Face Hub
+ :param model: the pytorch model we want to save
+ :param hyperparameters: training hyperparameters
+ :param eval_env: evaluation environment
+ :param video_fps: how many frame per seconds to record our video replay
+ :param local_repo_path: where the local repository is
+ """
+
+ _, repo_name = repo_id.split("/")
+ api = HfApi()
+
+ # Step 1: Create the repo
+ repo_url = api.create_repo(
+ repo_id=repo_id,
+ exist_ok=True,
+ )
+
+ # Step 2: Download files
+ repo_local_path = Path(snapshot_download(repo_id=repo_id))
+
+ # Step 3: Save the model
+ torch.save(model, os.path.join(repo_local_path, "model.pt"))
+
+ # Step 4: Save the hyperparameters to JSON
+ with open(Path(repo_local_path) / "hyperparameters.json", "w") as outfile:
+ json.dump(hyperparameters, outfile)
+
+ # Step 5: Evaluate the model and build JSON
+ mean_reward, std_reward = evaluate_agent(
+ eval_env, hyperparameters["max_t"], hyperparameters["n_evaluation_episodes"], model
+ )
+ # Get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters["env_id"],
+ "mean_reward": mean_reward,
+ "n_evaluation_episodes": hyperparameters["n_evaluation_episodes"],
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(Path(repo_local_path) / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 6: Create the model card
+ # Env id
+ env_name = hyperparameters["env_id"]
+
+ metadata = {}
+ metadata["tags"] = [env_name, "reinforce", "reinforcement-learning", "custom-implementation", "deep-rl-class"]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=repo_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_name,
+ dataset_id=env_name,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ model_card = f"""
+ # **Reinforce** Agent playing **{env_id}**
+ This is a trained model of a **Reinforce** agent playing **{env_id}** .
+ To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
+ """
+
+ readme_path = repo_local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+ # Step 7: Record a video
+ video_path = repo_local_path / "replay.mp4"
+ record_video(env, model, video_path, video_fps)
+
+ # Step 7. Push everything to the Hub
+ api.upload_folder(
+ repo_id=repo_id,
+ folder_path=repo_local_path,
+ path_in_repo=".",
+ )
+
+ print(f"Your model is pushed to the hub. You can view your model here: {repo_url}")
+```
+
+### .
+
+By using `push_to_hub` **you evaluate, record a replay, generate a model card of your agent and push it to the Hub**.
+
+This way:
+- You can **showcase our work** 🔥
+- You can **visualize your agent playing** 👀
+- You can **share with the community an agent that others can use** 💾
+- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
+
+
+To be able to share your model with the community there are three more steps to follow:
+
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
+
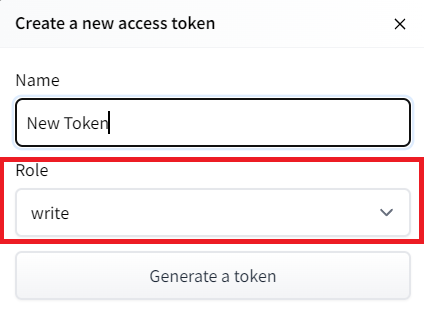
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
+- Create a new token (https://huggingface.co/settings/tokens) **with write role**
+
+
+
+
+### Push to the Hub
+#### Do not modify this code
+
+```python
+from huggingface_hub import HfApi, snapshot_download
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import json
+import imageio
+
+import os
+```
+
+```python
+def record_video(env, policy, out_directory, fps=30):
+ """
+ Generate a replay video of the agent
+ :param env
+ :param Qtable: Qtable of our agent
+ :param out_directory
+ :param fps: how many frame per seconds (with taxi-v3 and frozenlake-v1 we use 1)
+ """
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _ = policy.act(state)
+ state, reward, done, info = env.step(action) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+```
+
+```python
+def push_to_hub(repo_id, model, hyperparameters, eval_env, video_fps=30, local_repo_path="hub"):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the Hub
+
+ :param repo_id: repo_id: id of the model repository from the Hugging Face Hub
+ :param model: the pytorch model we want to save
+ :param hyperparameters: training hyperparameters
+ :param eval_env: evaluation environment
+ :param video_fps: how many frame per seconds to record our video replay
+ :param local_repo_path: where the local repository is
+ """
+
+ _, repo_name = repo_id.split("/")
+ api = HfApi()
+
+ # Step 1: Create the repo
+ repo_url = api.create_repo(
+ repo_id=repo_id,
+ exist_ok=True,
+ )
+
+ # Step 2: Download files
+ repo_local_path = Path(snapshot_download(repo_id=repo_id))
+
+ # Step 3: Save the model
+ torch.save(model, os.path.join(repo_local_path, "model.pt"))
+
+ # Step 4: Save the hyperparameters to JSON
+ with open(Path(repo_local_path) / "hyperparameters.json", "w") as outfile:
+ json.dump(hyperparameters, outfile)
+
+ # Step 5: Evaluate the model and build JSON
+ mean_reward, std_reward = evaluate_agent(
+ eval_env, hyperparameters["max_t"], hyperparameters["n_evaluation_episodes"], model
+ )
+ # Get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters["env_id"],
+ "mean_reward": mean_reward,
+ "n_evaluation_episodes": hyperparameters["n_evaluation_episodes"],
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(Path(repo_local_path) / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 6: Create the model card
+ # Env id
+ env_name = hyperparameters["env_id"]
+
+ metadata = {}
+ metadata["tags"] = [env_name, "reinforce", "reinforcement-learning", "custom-implementation", "deep-rl-class"]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=repo_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_name,
+ dataset_id=env_name,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ model_card = f"""
+ # **Reinforce** Agent playing **{env_id}**
+ This is a trained model of a **Reinforce** agent playing **{env_id}** .
+ To learn to use this model and train yours check Unit 4 of the Deep Reinforcement Learning Course: https://huggingface.co/deep-rl-course/unit4/introduction
+ """
+
+ readme_path = repo_local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+ # Step 7: Record a video
+ video_path = repo_local_path / "replay.mp4"
+ record_video(env, model, video_path, video_fps)
+
+ # Step 7. Push everything to the Hub
+ api.upload_folder(
+ repo_id=repo_id,
+ folder_path=repo_local_path,
+ path_in_repo=".",
+ )
+
+ print(f"Your model is pushed to the hub. You can view your model here: {repo_url}")
+```
+
+### .
+
+By using `push_to_hub` **you evaluate, record a replay, generate a model card of your agent and push it to the Hub**.
+
+This way:
+- You can **showcase our work** 🔥
+- You can **visualize your agent playing** 👀
+- You can **share with the community an agent that others can use** 💾
+- You can **access a leaderboard 🏆 to see how well your agent is performing compared to your classmates** 👉 https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard
+
+
+To be able to share your model with the community there are three more steps to follow:
+
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
+
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
+- Create a new token (https://huggingface.co/settings/tokens) **with write role**
+
+
+ +
+
+```python
+from huggingface_hub import notebook_login
+
+notebook_login()
+```
+
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login` (or `login`)
+
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function
+
+```python
+repo_id = "" # TODO Define your repo id {username/Reinforce-{model-id}}
+push_to_hub(
+ repo_id,
+ cartpole_policy, # The model we want to save
+ cartpole_hyperparameters, # Hyperparameters
+ eval_env, # Evaluation environment
+ video_fps=30,
+ local_repo_path="hub",
+)
+```
+
+Now that we try the robustness of our implementation, let's try a more complex environment: PixelCopter 🚁
+
+
+
+
+## Second agent: PixelCopter 🚁
+
+### Study the PixelCopter environment 👀
+- [The Environment documentation](https://pygame-learning-environment.readthedocs.io/en/latest/user/games/pixelcopter.html)
+
+
+```python
+env_id = "Pixelcopter-PLE-v0"
+env = gym.make(env_id)
+eval_env = gym.make(env_id)
+s_size = env.observation_space.shape[0]
+a_size = env.action_space.n
+```
+
+```python
+print("_____OBSERVATION SPACE_____ \n")
+print("The State Space is: ", s_size)
+print("Sample observation", env.observation_space.sample()) # Get a random observation
+```
+
+```python
+print("\n _____ACTION SPACE_____ \n")
+print("The Action Space is: ", a_size)
+print("Action Space Sample", env.action_space.sample()) # Take a random action
+```
+
+The observation space (7) 👀:
+- player y position
+- player velocity
+- player distance to floor
+- player distance to ceiling
+- next block x distance to player
+- next blocks top y location
+- next blocks bottom y location
+
+The action space(2) 🎮:
+- Up
+- Down
+
+The reward function 💰:
+- For each vertical block it passes through it gains a positive reward of +1. Each time a terminal state reached it receives a negative reward of -1.
+
+### Define the new Policy 🧠
+- We need to have a deeper neural network since the environment is more complex
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ # Define the three layers here
+
+ def forward(self, x):
+ # Define the forward process here
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+#### Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, h_size * 2)
+ self.fc3 = nn.Linear(h_size * 2, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = F.relu(self.fc2(x))
+ x = self.fc3(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+### Define the hyperparameters ⚙️
+- Because this environment is more complex.
+- Especially for the hidden size, we need more neurons.
+
+```python
+pixelcopter_hyperparameters = {
+ "h_size": 64,
+ "n_training_episodes": 50000,
+ "n_evaluation_episodes": 10,
+ "max_t": 10000,
+ "gamma": 0.99,
+ "lr": 1e-4,
+ "env_id": env_id,
+ "state_space": s_size,
+ "action_space": a_size,
+}
+```
+
+### Train it
+- We're now ready to train our agent 🔥.
+
+```python
+# Create policy and place it to the device
+# torch.manual_seed(50)
+pixelcopter_policy = Policy(
+ pixelcopter_hyperparameters["state_space"],
+ pixelcopter_hyperparameters["action_space"],
+ pixelcopter_hyperparameters["h_size"],
+).to(device)
+pixelcopter_optimizer = optim.Adam(pixelcopter_policy.parameters(), lr=pixelcopter_hyperparameters["lr"])
+```
+
+```python
+scores = reinforce(
+ pixelcopter_policy,
+ pixelcopter_optimizer,
+ pixelcopter_hyperparameters["n_training_episodes"],
+ pixelcopter_hyperparameters["max_t"],
+ pixelcopter_hyperparameters["gamma"],
+ 1000,
+)
+```
+
+### Publish our trained model on the Hub 🔥
+
+```python
+repo_id = "" # TODO Define your repo id {username/Reinforce-{model-id}}
+push_to_hub(
+ repo_id,
+ pixelcopter_policy, # The model we want to save
+ pixelcopter_hyperparameters, # Hyperparameters
+ eval_env, # Evaluation environment
+ video_fps=30,
+ local_repo_path="hub",
+)
+```
+
+## Some additional challenges 🏆
+The best way to learn **is to try things on your own**! As you saw, the current agent is not doing great. As a first suggestion, you can train for more steps. But also trying to find better parameters.
+
+In the [Leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) you will find your agents. Can you get to the top?
+
+Here are some ideas to achieve so:
+* Train more steps
+* Try different hyperparameters by looking at what your classmates have done 👉 https://huggingface.co/models?other=reinforce
+* **Push your new trained model** on the Hub 🔥
+* **Improving the implementation for more complex environments** (for instance, what about changing the network to a Convolutional Neural Network to handle
+frames as observation)?
+
+________________________________________________________________________
+
+**Congrats on finishing this unit**! There was a lot of information.
+And congrats on finishing the tutorial. You've just coded your first Deep Reinforcement Learning agent from scratch using PyTorch and shared it on the Hub 🥳.
+
+Don't hesitate to iterate on this unit **by improving the implementation for more complex environments** (for instance, what about changing the network to a Convolutional Neural Network to handle
+frames as observation)?
+
+In the next unit, **we're going to learn more about Unity MLAgents**, by training agents in Unity environments. This way, you will be ready to participate in the **AI vs AI challenges where you'll train your agents
+to compete against other agents in a snowball fight and a soccer game.**
+
+Sounds fun? See you next time!
+
+Finally, we would love **to hear what you think of the course and how we can improve it**. If you have some feedback then, please 👉 [fill this form](https://forms.gle/BzKXWzLAGZESGNaE9)
+
+See you in Unit 5! 🔥
+
+### Keep Learning, stay awesome 🤗
+
+
+```python
+from huggingface_hub import notebook_login
+
+notebook_login()
+```
+
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login` (or `login`)
+
+3️⃣ We're now ready to push our trained agent to the 🤗 Hub 🔥 using `package_to_hub()` function
+
+```python
+repo_id = "" # TODO Define your repo id {username/Reinforce-{model-id}}
+push_to_hub(
+ repo_id,
+ cartpole_policy, # The model we want to save
+ cartpole_hyperparameters, # Hyperparameters
+ eval_env, # Evaluation environment
+ video_fps=30,
+ local_repo_path="hub",
+)
+```
+
+Now that we try the robustness of our implementation, let's try a more complex environment: PixelCopter 🚁
+
+
+
+
+## Second agent: PixelCopter 🚁
+
+### Study the PixelCopter environment 👀
+- [The Environment documentation](https://pygame-learning-environment.readthedocs.io/en/latest/user/games/pixelcopter.html)
+
+
+```python
+env_id = "Pixelcopter-PLE-v0"
+env = gym.make(env_id)
+eval_env = gym.make(env_id)
+s_size = env.observation_space.shape[0]
+a_size = env.action_space.n
+```
+
+```python
+print("_____OBSERVATION SPACE_____ \n")
+print("The State Space is: ", s_size)
+print("Sample observation", env.observation_space.sample()) # Get a random observation
+```
+
+```python
+print("\n _____ACTION SPACE_____ \n")
+print("The Action Space is: ", a_size)
+print("Action Space Sample", env.action_space.sample()) # Take a random action
+```
+
+The observation space (7) 👀:
+- player y position
+- player velocity
+- player distance to floor
+- player distance to ceiling
+- next block x distance to player
+- next blocks top y location
+- next blocks bottom y location
+
+The action space(2) 🎮:
+- Up
+- Down
+
+The reward function 💰:
+- For each vertical block it passes through it gains a positive reward of +1. Each time a terminal state reached it receives a negative reward of -1.
+
+### Define the new Policy 🧠
+- We need to have a deeper neural network since the environment is more complex
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ # Define the three layers here
+
+ def forward(self, x):
+ # Define the forward process here
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+#### Solution
+
+```python
+class Policy(nn.Module):
+ def __init__(self, s_size, a_size, h_size):
+ super(Policy, self).__init__()
+ self.fc1 = nn.Linear(s_size, h_size)
+ self.fc2 = nn.Linear(h_size, h_size * 2)
+ self.fc3 = nn.Linear(h_size * 2, a_size)
+
+ def forward(self, x):
+ x = F.relu(self.fc1(x))
+ x = F.relu(self.fc2(x))
+ x = self.fc3(x)
+ return F.softmax(x, dim=1)
+
+ def act(self, state):
+ state = torch.from_numpy(state).float().unsqueeze(0).to(device)
+ probs = self.forward(state).cpu()
+ m = Categorical(probs)
+ action = m.sample()
+ return action.item(), m.log_prob(action)
+```
+
+### Define the hyperparameters ⚙️
+- Because this environment is more complex.
+- Especially for the hidden size, we need more neurons.
+
+```python
+pixelcopter_hyperparameters = {
+ "h_size": 64,
+ "n_training_episodes": 50000,
+ "n_evaluation_episodes": 10,
+ "max_t": 10000,
+ "gamma": 0.99,
+ "lr": 1e-4,
+ "env_id": env_id,
+ "state_space": s_size,
+ "action_space": a_size,
+}
+```
+
+### Train it
+- We're now ready to train our agent 🔥.
+
+```python
+# Create policy and place it to the device
+# torch.manual_seed(50)
+pixelcopter_policy = Policy(
+ pixelcopter_hyperparameters["state_space"],
+ pixelcopter_hyperparameters["action_space"],
+ pixelcopter_hyperparameters["h_size"],
+).to(device)
+pixelcopter_optimizer = optim.Adam(pixelcopter_policy.parameters(), lr=pixelcopter_hyperparameters["lr"])
+```
+
+```python
+scores = reinforce(
+ pixelcopter_policy,
+ pixelcopter_optimizer,
+ pixelcopter_hyperparameters["n_training_episodes"],
+ pixelcopter_hyperparameters["max_t"],
+ pixelcopter_hyperparameters["gamma"],
+ 1000,
+)
+```
+
+### Publish our trained model on the Hub 🔥
+
+```python
+repo_id = "" # TODO Define your repo id {username/Reinforce-{model-id}}
+push_to_hub(
+ repo_id,
+ pixelcopter_policy, # The model we want to save
+ pixelcopter_hyperparameters, # Hyperparameters
+ eval_env, # Evaluation environment
+ video_fps=30,
+ local_repo_path="hub",
+)
+```
+
+## Some additional challenges 🏆
+The best way to learn **is to try things on your own**! As you saw, the current agent is not doing great. As a first suggestion, you can train for more steps. But also trying to find better parameters.
+
+In the [Leaderboard](https://huggingface.co/spaces/huggingface-projects/Deep-Reinforcement-Learning-Leaderboard) you will find your agents. Can you get to the top?
+
+Here are some ideas to achieve so:
+* Train more steps
+* Try different hyperparameters by looking at what your classmates have done 👉 https://huggingface.co/models?other=reinforce
+* **Push your new trained model** on the Hub 🔥
+* **Improving the implementation for more complex environments** (for instance, what about changing the network to a Convolutional Neural Network to handle
+frames as observation)?
+
+________________________________________________________________________
+
+**Congrats on finishing this unit**! There was a lot of information.
+And congrats on finishing the tutorial. You've just coded your first Deep Reinforcement Learning agent from scratch using PyTorch and shared it on the Hub 🥳.
+
+Don't hesitate to iterate on this unit **by improving the implementation for more complex environments** (for instance, what about changing the network to a Convolutional Neural Network to handle
+frames as observation)?
+
+In the next unit, **we're going to learn more about Unity MLAgents**, by training agents in Unity environments. This way, you will be ready to participate in the **AI vs AI challenges where you'll train your agents
+to compete against other agents in a snowball fight and a soccer game.**
+
+Sounds fun? See you next time!
+
+Finally, we would love **to hear what you think of the course and how we can improve it**. If you have some feedback then, please 👉 [fill this form](https://forms.gle/BzKXWzLAGZESGNaE9)
+
+See you in Unit 5! 🔥
+
+### Keep Learning, stay awesome 🤗