diff --git a/notebooks/unit8/unit8_part1.mdx b/notebooks/unit8/unit8_part1.mdx
new file mode 100644
index 0000000..0606dac
--- /dev/null
+++ b/notebooks/unit8/unit8_part1.mdx
@@ -0,0 +1,1068 @@
+ +
+# Unit 8: Proximal Policy Gradient (PPO) with PyTorch 🤖
+
+
+
+# Unit 8: Proximal Policy Gradient (PPO) with PyTorch 🤖
+
+ +
+
+In this notebook, you'll learn to **code your PPO agent from scratch with PyTorch using CleanRL implementation as model**.
+
+To test its robustness, we're going to train it in:
+
+- [LunarLander-v2 🚀](https://www.gymlibrary.dev/environments/box2d/lunar_lander/)
+
+
+⬇️ Here is an example of what you will achieve. ⬇️
+
+```python
+%%html
+
+```
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
+
+## Objectives of this notebook 🏆
+
+At the end of the notebook, you will:
+
+- Be able to **code your PPO agent from scratch using PyTorch**.
+- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
+
+
+
+
+## This notebook is from the Deep Reinforcement Learning Course
+
+
+
+In this notebook, you'll learn to **code your PPO agent from scratch with PyTorch using CleanRL implementation as model**.
+
+To test its robustness, we're going to train it in:
+
+- [LunarLander-v2 🚀](https://www.gymlibrary.dev/environments/box2d/lunar_lander/)
+
+
+⬇️ Here is an example of what you will achieve. ⬇️
+
+```python
+%%html
+
+```
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
+
+## Objectives of this notebook 🏆
+
+At the end of the notebook, you will:
+
+- Be able to **code your PPO agent from scratch using PyTorch**.
+- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
+
+
+
+
+## This notebook is from the Deep Reinforcement Learning Course
+ +
+In this free course, you will:
+
+- 📖 Study Deep Reinforcement Learning in **theory and practice**.
+- 🧑💻 Learn to **use famous Deep RL libraries** such as Stable Baselines3, RL Baselines3 Zoo, CleanRL and Sample Factory 2.0.
+- 🤖 Train **agents in unique environments**
+
+Don’t forget to **sign up to the course** (we are collecting your email to be able to **send you the links when each Unit is published and give you information about the challenges and updates).**
+
+
+The best way to keep in touch is to join our discord server to exchange with the community and with us 👉🏻 https://discord.gg/ydHrjt3WP5
+
+## Prerequisites 🏗️
+Before diving into the notebook, you need to:
+
+🔲 📚 Study [PPO by reading Unit 8](https://huggingface.co/deep-rl-course/unit8/introduction) 🤗
+
+To validate this hands-on for the [certification process](https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process), you need to push one model, we don't ask for a minimal result but we **advise you to try different hyperparameters settings to get better results**.
+
+If you don't find your model, **go to the bottom of the page and click on the refresh button**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
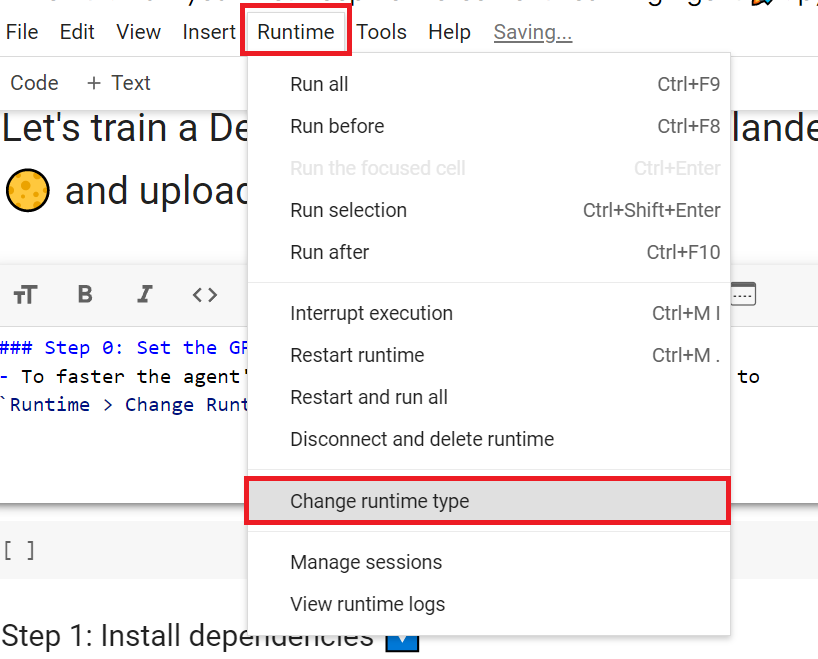
+## Set the GPU 💪
+- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
+
+
+
+In this free course, you will:
+
+- 📖 Study Deep Reinforcement Learning in **theory and practice**.
+- 🧑💻 Learn to **use famous Deep RL libraries** such as Stable Baselines3, RL Baselines3 Zoo, CleanRL and Sample Factory 2.0.
+- 🤖 Train **agents in unique environments**
+
+Don’t forget to **sign up to the course** (we are collecting your email to be able to **send you the links when each Unit is published and give you information about the challenges and updates).**
+
+
+The best way to keep in touch is to join our discord server to exchange with the community and with us 👉🏻 https://discord.gg/ydHrjt3WP5
+
+## Prerequisites 🏗️
+Before diving into the notebook, you need to:
+
+🔲 📚 Study [PPO by reading Unit 8](https://huggingface.co/deep-rl-course/unit8/introduction) 🤗
+
+To validate this hands-on for the [certification process](https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process), you need to push one model, we don't ask for a minimal result but we **advise you to try different hyperparameters settings to get better results**.
+
+If you don't find your model, **go to the bottom of the page and click on the refresh button**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
+## Set the GPU 💪
+- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
+
+ +
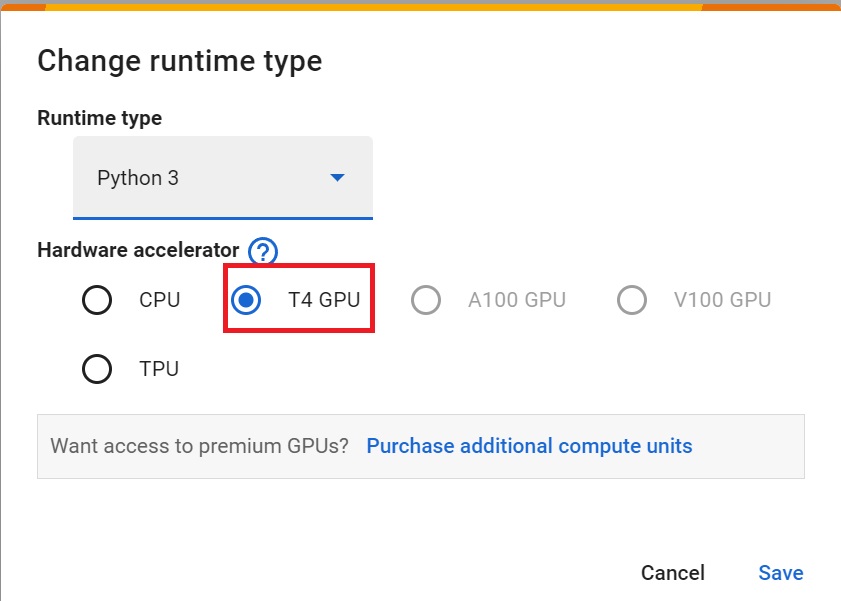
+- `Hardware Accelerator > GPU`
+
+
+
+- `Hardware Accelerator > GPU`
+
+ +
+## Create a virtual display 🔽
+
+During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
+
+```python
+%%capture
+!apt install python-opengl
+!apt install ffmpeg
+!apt install xvfb
+!pip install pyglet==1.5
+!pip3 install pyvirtualdisplay
+```
+
+```python
+# Virtual display
+from pyvirtualdisplay import Display
+
+virtual_display = Display(visible=0, size=(1400, 900))
+virtual_display.start()
+```
+
+## Install dependencies 🔽
+For this exercise, we use `gym==0.21`
+
+
+```python
+!pip install gym==0.21
+!pip install imageio-ffmpeg
+!pip install huggingface_hub
+!pip install box2d
+```
+
+## Let's code PPO from scratch with Costa Huang tutorial
+- For the core implementation of PPO we're going to use the excellent [Costa Huang](https://costa.sh/) tutorial.
+- In addition to the tutorial, to go deeper you can read the 37 core implementation details: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/
+
+👉 The video tutorial: https://youtu.be/MEt6rrxH8W4
+
+```python
+from IPython.display import HTML
+
+HTML(
+ ''
+)
+```
+
+- The best is to code first on the cell below, this way, if you kill the machine **you don't loose the implementation**.
+
+```python
+### Your code here:
+```
+
+## Add the Hugging Face Integration 🤗
+- In order to push our model to the Hub, we need to define a function `package_to_hub`
+
+- Add dependencies we need to push our model to the Hub
+
+```python
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+```
+
+- Add new argument in `parse_args()` function to define the repo-id where we want to push the model.
+
+```python
+# Adding HuggingFace argument
+parser.add_argument(
+ "--repo-id",
+ type=str,
+ default="ThomasSimonini/ppo-CartPole-v1",
+ help="id of the model repository from the Hugging Face Hub {username/repo_name}",
+)
+```
+
+- Next, we add the methods needed to push the model to the Hub
+
+- These methods will:
+ - `_evalutate_agent()`: evaluate the agent.
+ - `_generate_model_card()`: generate the model card of your agent.
+ - `_record_video()`: record a video of your agent.
+
+```python
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+```
+
+- Finally, we call this function at the end of the PPO training
+
+```python
+# Create the evaluation environment
+eval_env = gym.make(args.env_id)
+
+package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+)
+```
+
+- Here's what look the ppo.py final file
+
+```python
+# docs and experiment results can be found at https://docs.cleanrl.dev/rl-algorithms/ppo/#ppopy
+
+import argparse
+import os
+import random
+import time
+from distutils.util import strtobool
+
+import gym
+import numpy as np
+import torch
+import torch.nn as nn
+import torch.optim as optim
+from torch.distributions.categorical import Categorical
+from torch.utils.tensorboard import SummaryWriter
+
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+
+
+def parse_args():
+ # fmt: off
+ parser = argparse.ArgumentParser()
+ parser.add_argument("--exp-name", type=str, default=os.path.basename(__file__).rstrip(".py"),
+ help="the name of this experiment")
+ parser.add_argument("--seed", type=int, default=1,
+ help="seed of the experiment")
+ parser.add_argument("--torch-deterministic", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, `torch.backends.cudnn.deterministic=False`")
+ parser.add_argument("--cuda", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, cuda will be enabled by default")
+ parser.add_argument("--track", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="if toggled, this experiment will be tracked with Weights and Biases")
+ parser.add_argument("--wandb-project-name", type=str, default="cleanRL",
+ help="the wandb's project name")
+ parser.add_argument("--wandb-entity", type=str, default=None,
+ help="the entity (team) of wandb's project")
+ parser.add_argument("--capture-video", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="weather to capture videos of the agent performances (check out `videos` folder)")
+
+ # Algorithm specific arguments
+ parser.add_argument("--env-id", type=str, default="CartPole-v1",
+ help="the id of the environment")
+ parser.add_argument("--total-timesteps", type=int, default=50000,
+ help="total timesteps of the experiments")
+ parser.add_argument("--learning-rate", type=float, default=2.5e-4,
+ help="the learning rate of the optimizer")
+ parser.add_argument("--num-envs", type=int, default=4,
+ help="the number of parallel game environments")
+ parser.add_argument("--num-steps", type=int, default=128,
+ help="the number of steps to run in each environment per policy rollout")
+ parser.add_argument("--anneal-lr", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggle learning rate annealing for policy and value networks")
+ parser.add_argument("--gae", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Use GAE for advantage computation")
+ parser.add_argument("--gamma", type=float, default=0.99,
+ help="the discount factor gamma")
+ parser.add_argument("--gae-lambda", type=float, default=0.95,
+ help="the lambda for the general advantage estimation")
+ parser.add_argument("--num-minibatches", type=int, default=4,
+ help="the number of mini-batches")
+ parser.add_argument("--update-epochs", type=int, default=4,
+ help="the K epochs to update the policy")
+ parser.add_argument("--norm-adv", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles advantages normalization")
+ parser.add_argument("--clip-coef", type=float, default=0.2,
+ help="the surrogate clipping coefficient")
+ parser.add_argument("--clip-vloss", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles whether or not to use a clipped loss for the value function, as per the paper.")
+ parser.add_argument("--ent-coef", type=float, default=0.01,
+ help="coefficient of the entropy")
+ parser.add_argument("--vf-coef", type=float, default=0.5,
+ help="coefficient of the value function")
+ parser.add_argument("--max-grad-norm", type=float, default=0.5,
+ help="the maximum norm for the gradient clipping")
+ parser.add_argument("--target-kl", type=float, default=None,
+ help="the target KL divergence threshold")
+
+ # Adding HuggingFace argument
+ parser.add_argument("--repo-id", type=str, default="ThomasSimonini/ppo-CartPole-v1", help="id of the model repository from the Hugging Face Hub {username/repo_name}")
+
+ args = parser.parse_args()
+ args.batch_size = int(args.num_envs * args.num_steps)
+ args.minibatch_size = int(args.batch_size // args.num_minibatches)
+ # fmt: on
+ return args
+
+
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+
+
+def make_env(env_id, seed, idx, capture_video, run_name):
+ def thunk():
+ env = gym.make(env_id)
+ env = gym.wrappers.RecordEpisodeStatistics(env)
+ if capture_video:
+ if idx == 0:
+ env = gym.wrappers.RecordVideo(env, f"videos/{run_name}")
+ env.seed(seed)
+ env.action_space.seed(seed)
+ env.observation_space.seed(seed)
+ return env
+
+ return thunk
+
+
+def layer_init(layer, std=np.sqrt(2), bias_const=0.0):
+ torch.nn.init.orthogonal_(layer.weight, std)
+ torch.nn.init.constant_(layer.bias, bias_const)
+ return layer
+
+
+class Agent(nn.Module):
+ def __init__(self, envs):
+ super().__init__()
+ self.critic = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 1), std=1.0),
+ )
+ self.actor = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, envs.single_action_space.n), std=0.01),
+ )
+
+ def get_value(self, x):
+ return self.critic(x)
+
+ def get_action_and_value(self, x, action=None):
+ logits = self.actor(x)
+ probs = Categorical(logits=logits)
+ if action is None:
+ action = probs.sample()
+ return action, probs.log_prob(action), probs.entropy(), self.critic(x)
+
+
+if __name__ == "__main__":
+ args = parse_args()
+ run_name = f"{args.env_id}__{args.exp_name}__{args.seed}__{int(time.time())}"
+ if args.track:
+ import wandb
+
+ wandb.init(
+ project=args.wandb_project_name,
+ entity=args.wandb_entity,
+ sync_tensorboard=True,
+ config=vars(args),
+ name=run_name,
+ monitor_gym=True,
+ save_code=True,
+ )
+ writer = SummaryWriter(f"runs/{run_name}")
+ writer.add_text(
+ "hyperparameters",
+ "|param|value|\n|-|-|\n%s" % ("\n".join([f"|{key}|{value}|" for key, value in vars(args).items()])),
+ )
+
+ # TRY NOT TO MODIFY: seeding
+ random.seed(args.seed)
+ np.random.seed(args.seed)
+ torch.manual_seed(args.seed)
+ torch.backends.cudnn.deterministic = args.torch_deterministic
+
+ device = torch.device("cuda" if torch.cuda.is_available() and args.cuda else "cpu")
+
+ # env setup
+ envs = gym.vector.SyncVectorEnv(
+ [make_env(args.env_id, args.seed + i, i, args.capture_video, run_name) for i in range(args.num_envs)]
+ )
+ assert isinstance(envs.single_action_space, gym.spaces.Discrete), "only discrete action space is supported"
+
+ agent = Agent(envs).to(device)
+ optimizer = optim.Adam(agent.parameters(), lr=args.learning_rate, eps=1e-5)
+
+ # ALGO Logic: Storage setup
+ obs = torch.zeros((args.num_steps, args.num_envs) + envs.single_observation_space.shape).to(device)
+ actions = torch.zeros((args.num_steps, args.num_envs) + envs.single_action_space.shape).to(device)
+ logprobs = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ rewards = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ dones = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ values = torch.zeros((args.num_steps, args.num_envs)).to(device)
+
+ # TRY NOT TO MODIFY: start the game
+ global_step = 0
+ start_time = time.time()
+ next_obs = torch.Tensor(envs.reset()).to(device)
+ next_done = torch.zeros(args.num_envs).to(device)
+ num_updates = args.total_timesteps // args.batch_size
+
+ for update in range(1, num_updates + 1):
+ # Annealing the rate if instructed to do so.
+ if args.anneal_lr:
+ frac = 1.0 - (update - 1.0) / num_updates
+ lrnow = frac * args.learning_rate
+ optimizer.param_groups[0]["lr"] = lrnow
+
+ for step in range(0, args.num_steps):
+ global_step += 1 * args.num_envs
+ obs[step] = next_obs
+ dones[step] = next_done
+
+ # ALGO LOGIC: action logic
+ with torch.no_grad():
+ action, logprob, _, value = agent.get_action_and_value(next_obs)
+ values[step] = value.flatten()
+ actions[step] = action
+ logprobs[step] = logprob
+
+ # TRY NOT TO MODIFY: execute the game and log data.
+ next_obs, reward, done, info = envs.step(action.cpu().numpy())
+ rewards[step] = torch.tensor(reward).to(device).view(-1)
+ next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
+
+ for item in info:
+ if "episode" in item.keys():
+ print(f"global_step={global_step}, episodic_return={item['episode']['r']}")
+ writer.add_scalar("charts/episodic_return", item["episode"]["r"], global_step)
+ writer.add_scalar("charts/episodic_length", item["episode"]["l"], global_step)
+ break
+
+ # bootstrap value if not done
+ with torch.no_grad():
+ next_value = agent.get_value(next_obs).reshape(1, -1)
+ if args.gae:
+ advantages = torch.zeros_like(rewards).to(device)
+ lastgaelam = 0
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ nextvalues = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ nextvalues = values[t + 1]
+ delta = rewards[t] + args.gamma * nextvalues * nextnonterminal - values[t]
+ advantages[t] = lastgaelam = delta + args.gamma * args.gae_lambda * nextnonterminal * lastgaelam
+ returns = advantages + values
+ else:
+ returns = torch.zeros_like(rewards).to(device)
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ next_return = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ next_return = returns[t + 1]
+ returns[t] = rewards[t] + args.gamma * nextnonterminal * next_return
+ advantages = returns - values
+
+ # flatten the batch
+ b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
+ b_logprobs = logprobs.reshape(-1)
+ b_actions = actions.reshape((-1,) + envs.single_action_space.shape)
+ b_advantages = advantages.reshape(-1)
+ b_returns = returns.reshape(-1)
+ b_values = values.reshape(-1)
+
+ # Optimizing the policy and value network
+ b_inds = np.arange(args.batch_size)
+ clipfracs = []
+ for epoch in range(args.update_epochs):
+ np.random.shuffle(b_inds)
+ for start in range(0, args.batch_size, args.minibatch_size):
+ end = start + args.minibatch_size
+ mb_inds = b_inds[start:end]
+
+ _, newlogprob, entropy, newvalue = agent.get_action_and_value(
+ b_obs[mb_inds], b_actions.long()[mb_inds]
+ )
+ logratio = newlogprob - b_logprobs[mb_inds]
+ ratio = logratio.exp()
+
+ with torch.no_grad():
+ # calculate approx_kl http://joschu.net/blog/kl-approx.html
+ old_approx_kl = (-logratio).mean()
+ approx_kl = ((ratio - 1) - logratio).mean()
+ clipfracs += [((ratio - 1.0).abs() > args.clip_coef).float().mean().item()]
+
+ mb_advantages = b_advantages[mb_inds]
+ if args.norm_adv:
+ mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
+
+ # Policy loss
+ pg_loss1 = -mb_advantages * ratio
+ pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - args.clip_coef, 1 + args.clip_coef)
+ pg_loss = torch.max(pg_loss1, pg_loss2).mean()
+
+ # Value loss
+ newvalue = newvalue.view(-1)
+ if args.clip_vloss:
+ v_loss_unclipped = (newvalue - b_returns[mb_inds]) ** 2
+ v_clipped = b_values[mb_inds] + torch.clamp(
+ newvalue - b_values[mb_inds],
+ -args.clip_coef,
+ args.clip_coef,
+ )
+ v_loss_clipped = (v_clipped - b_returns[mb_inds]) ** 2
+ v_loss_max = torch.max(v_loss_unclipped, v_loss_clipped)
+ v_loss = 0.5 * v_loss_max.mean()
+ else:
+ v_loss = 0.5 * ((newvalue - b_returns[mb_inds]) ** 2).mean()
+
+ entropy_loss = entropy.mean()
+ loss = pg_loss - args.ent_coef * entropy_loss + v_loss * args.vf_coef
+
+ optimizer.zero_grad()
+ loss.backward()
+ nn.utils.clip_grad_norm_(agent.parameters(), args.max_grad_norm)
+ optimizer.step()
+
+ if args.target_kl is not None:
+ if approx_kl > args.target_kl:
+ break
+
+ y_pred, y_true = b_values.cpu().numpy(), b_returns.cpu().numpy()
+ var_y = np.var(y_true)
+ explained_var = np.nan if var_y == 0 else 1 - np.var(y_true - y_pred) / var_y
+
+ # TRY NOT TO MODIFY: record rewards for plotting purposes
+ writer.add_scalar("charts/learning_rate", optimizer.param_groups[0]["lr"], global_step)
+ writer.add_scalar("losses/value_loss", v_loss.item(), global_step)
+ writer.add_scalar("losses/policy_loss", pg_loss.item(), global_step)
+ writer.add_scalar("losses/entropy", entropy_loss.item(), global_step)
+ writer.add_scalar("losses/old_approx_kl", old_approx_kl.item(), global_step)
+ writer.add_scalar("losses/approx_kl", approx_kl.item(), global_step)
+ writer.add_scalar("losses/clipfrac", np.mean(clipfracs), global_step)
+ writer.add_scalar("losses/explained_variance", explained_var, global_step)
+ print("SPS:", int(global_step / (time.time() - start_time)))
+ writer.add_scalar("charts/SPS", int(global_step / (time.time() - start_time)), global_step)
+
+ envs.close()
+ writer.close()
+
+ # Create the evaluation environment
+ eval_env = gym.make(args.env_id)
+
+ package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+ )
+```
+
+To be able to share your model with the community there are three more steps to follow:
+
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
+
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
+- Create a new token (https://huggingface.co/settings/tokens) **with write role**
+
+
+
+## Create a virtual display 🔽
+
+During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
+
+```python
+%%capture
+!apt install python-opengl
+!apt install ffmpeg
+!apt install xvfb
+!pip install pyglet==1.5
+!pip3 install pyvirtualdisplay
+```
+
+```python
+# Virtual display
+from pyvirtualdisplay import Display
+
+virtual_display = Display(visible=0, size=(1400, 900))
+virtual_display.start()
+```
+
+## Install dependencies 🔽
+For this exercise, we use `gym==0.21`
+
+
+```python
+!pip install gym==0.21
+!pip install imageio-ffmpeg
+!pip install huggingface_hub
+!pip install box2d
+```
+
+## Let's code PPO from scratch with Costa Huang tutorial
+- For the core implementation of PPO we're going to use the excellent [Costa Huang](https://costa.sh/) tutorial.
+- In addition to the tutorial, to go deeper you can read the 37 core implementation details: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/
+
+👉 The video tutorial: https://youtu.be/MEt6rrxH8W4
+
+```python
+from IPython.display import HTML
+
+HTML(
+ ''
+)
+```
+
+- The best is to code first on the cell below, this way, if you kill the machine **you don't loose the implementation**.
+
+```python
+### Your code here:
+```
+
+## Add the Hugging Face Integration 🤗
+- In order to push our model to the Hub, we need to define a function `package_to_hub`
+
+- Add dependencies we need to push our model to the Hub
+
+```python
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+```
+
+- Add new argument in `parse_args()` function to define the repo-id where we want to push the model.
+
+```python
+# Adding HuggingFace argument
+parser.add_argument(
+ "--repo-id",
+ type=str,
+ default="ThomasSimonini/ppo-CartPole-v1",
+ help="id of the model repository from the Hugging Face Hub {username/repo_name}",
+)
+```
+
+- Next, we add the methods needed to push the model to the Hub
+
+- These methods will:
+ - `_evalutate_agent()`: evaluate the agent.
+ - `_generate_model_card()`: generate the model card of your agent.
+ - `_record_video()`: record a video of your agent.
+
+```python
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+```
+
+- Finally, we call this function at the end of the PPO training
+
+```python
+# Create the evaluation environment
+eval_env = gym.make(args.env_id)
+
+package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+)
+```
+
+- Here's what look the ppo.py final file
+
+```python
+# docs and experiment results can be found at https://docs.cleanrl.dev/rl-algorithms/ppo/#ppopy
+
+import argparse
+import os
+import random
+import time
+from distutils.util import strtobool
+
+import gym
+import numpy as np
+import torch
+import torch.nn as nn
+import torch.optim as optim
+from torch.distributions.categorical import Categorical
+from torch.utils.tensorboard import SummaryWriter
+
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+
+
+def parse_args():
+ # fmt: off
+ parser = argparse.ArgumentParser()
+ parser.add_argument("--exp-name", type=str, default=os.path.basename(__file__).rstrip(".py"),
+ help="the name of this experiment")
+ parser.add_argument("--seed", type=int, default=1,
+ help="seed of the experiment")
+ parser.add_argument("--torch-deterministic", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, `torch.backends.cudnn.deterministic=False`")
+ parser.add_argument("--cuda", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, cuda will be enabled by default")
+ parser.add_argument("--track", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="if toggled, this experiment will be tracked with Weights and Biases")
+ parser.add_argument("--wandb-project-name", type=str, default="cleanRL",
+ help="the wandb's project name")
+ parser.add_argument("--wandb-entity", type=str, default=None,
+ help="the entity (team) of wandb's project")
+ parser.add_argument("--capture-video", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="weather to capture videos of the agent performances (check out `videos` folder)")
+
+ # Algorithm specific arguments
+ parser.add_argument("--env-id", type=str, default="CartPole-v1",
+ help="the id of the environment")
+ parser.add_argument("--total-timesteps", type=int, default=50000,
+ help="total timesteps of the experiments")
+ parser.add_argument("--learning-rate", type=float, default=2.5e-4,
+ help="the learning rate of the optimizer")
+ parser.add_argument("--num-envs", type=int, default=4,
+ help="the number of parallel game environments")
+ parser.add_argument("--num-steps", type=int, default=128,
+ help="the number of steps to run in each environment per policy rollout")
+ parser.add_argument("--anneal-lr", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggle learning rate annealing for policy and value networks")
+ parser.add_argument("--gae", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Use GAE for advantage computation")
+ parser.add_argument("--gamma", type=float, default=0.99,
+ help="the discount factor gamma")
+ parser.add_argument("--gae-lambda", type=float, default=0.95,
+ help="the lambda for the general advantage estimation")
+ parser.add_argument("--num-minibatches", type=int, default=4,
+ help="the number of mini-batches")
+ parser.add_argument("--update-epochs", type=int, default=4,
+ help="the K epochs to update the policy")
+ parser.add_argument("--norm-adv", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles advantages normalization")
+ parser.add_argument("--clip-coef", type=float, default=0.2,
+ help="the surrogate clipping coefficient")
+ parser.add_argument("--clip-vloss", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles whether or not to use a clipped loss for the value function, as per the paper.")
+ parser.add_argument("--ent-coef", type=float, default=0.01,
+ help="coefficient of the entropy")
+ parser.add_argument("--vf-coef", type=float, default=0.5,
+ help="coefficient of the value function")
+ parser.add_argument("--max-grad-norm", type=float, default=0.5,
+ help="the maximum norm for the gradient clipping")
+ parser.add_argument("--target-kl", type=float, default=None,
+ help="the target KL divergence threshold")
+
+ # Adding HuggingFace argument
+ parser.add_argument("--repo-id", type=str, default="ThomasSimonini/ppo-CartPole-v1", help="id of the model repository from the Hugging Face Hub {username/repo_name}")
+
+ args = parser.parse_args()
+ args.batch_size = int(args.num_envs * args.num_steps)
+ args.minibatch_size = int(args.batch_size // args.num_minibatches)
+ # fmt: on
+ return args
+
+
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+
+
+def make_env(env_id, seed, idx, capture_video, run_name):
+ def thunk():
+ env = gym.make(env_id)
+ env = gym.wrappers.RecordEpisodeStatistics(env)
+ if capture_video:
+ if idx == 0:
+ env = gym.wrappers.RecordVideo(env, f"videos/{run_name}")
+ env.seed(seed)
+ env.action_space.seed(seed)
+ env.observation_space.seed(seed)
+ return env
+
+ return thunk
+
+
+def layer_init(layer, std=np.sqrt(2), bias_const=0.0):
+ torch.nn.init.orthogonal_(layer.weight, std)
+ torch.nn.init.constant_(layer.bias, bias_const)
+ return layer
+
+
+class Agent(nn.Module):
+ def __init__(self, envs):
+ super().__init__()
+ self.critic = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 1), std=1.0),
+ )
+ self.actor = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, envs.single_action_space.n), std=0.01),
+ )
+
+ def get_value(self, x):
+ return self.critic(x)
+
+ def get_action_and_value(self, x, action=None):
+ logits = self.actor(x)
+ probs = Categorical(logits=logits)
+ if action is None:
+ action = probs.sample()
+ return action, probs.log_prob(action), probs.entropy(), self.critic(x)
+
+
+if __name__ == "__main__":
+ args = parse_args()
+ run_name = f"{args.env_id}__{args.exp_name}__{args.seed}__{int(time.time())}"
+ if args.track:
+ import wandb
+
+ wandb.init(
+ project=args.wandb_project_name,
+ entity=args.wandb_entity,
+ sync_tensorboard=True,
+ config=vars(args),
+ name=run_name,
+ monitor_gym=True,
+ save_code=True,
+ )
+ writer = SummaryWriter(f"runs/{run_name}")
+ writer.add_text(
+ "hyperparameters",
+ "|param|value|\n|-|-|\n%s" % ("\n".join([f"|{key}|{value}|" for key, value in vars(args).items()])),
+ )
+
+ # TRY NOT TO MODIFY: seeding
+ random.seed(args.seed)
+ np.random.seed(args.seed)
+ torch.manual_seed(args.seed)
+ torch.backends.cudnn.deterministic = args.torch_deterministic
+
+ device = torch.device("cuda" if torch.cuda.is_available() and args.cuda else "cpu")
+
+ # env setup
+ envs = gym.vector.SyncVectorEnv(
+ [make_env(args.env_id, args.seed + i, i, args.capture_video, run_name) for i in range(args.num_envs)]
+ )
+ assert isinstance(envs.single_action_space, gym.spaces.Discrete), "only discrete action space is supported"
+
+ agent = Agent(envs).to(device)
+ optimizer = optim.Adam(agent.parameters(), lr=args.learning_rate, eps=1e-5)
+
+ # ALGO Logic: Storage setup
+ obs = torch.zeros((args.num_steps, args.num_envs) + envs.single_observation_space.shape).to(device)
+ actions = torch.zeros((args.num_steps, args.num_envs) + envs.single_action_space.shape).to(device)
+ logprobs = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ rewards = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ dones = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ values = torch.zeros((args.num_steps, args.num_envs)).to(device)
+
+ # TRY NOT TO MODIFY: start the game
+ global_step = 0
+ start_time = time.time()
+ next_obs = torch.Tensor(envs.reset()).to(device)
+ next_done = torch.zeros(args.num_envs).to(device)
+ num_updates = args.total_timesteps // args.batch_size
+
+ for update in range(1, num_updates + 1):
+ # Annealing the rate if instructed to do so.
+ if args.anneal_lr:
+ frac = 1.0 - (update - 1.0) / num_updates
+ lrnow = frac * args.learning_rate
+ optimizer.param_groups[0]["lr"] = lrnow
+
+ for step in range(0, args.num_steps):
+ global_step += 1 * args.num_envs
+ obs[step] = next_obs
+ dones[step] = next_done
+
+ # ALGO LOGIC: action logic
+ with torch.no_grad():
+ action, logprob, _, value = agent.get_action_and_value(next_obs)
+ values[step] = value.flatten()
+ actions[step] = action
+ logprobs[step] = logprob
+
+ # TRY NOT TO MODIFY: execute the game and log data.
+ next_obs, reward, done, info = envs.step(action.cpu().numpy())
+ rewards[step] = torch.tensor(reward).to(device).view(-1)
+ next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
+
+ for item in info:
+ if "episode" in item.keys():
+ print(f"global_step={global_step}, episodic_return={item['episode']['r']}")
+ writer.add_scalar("charts/episodic_return", item["episode"]["r"], global_step)
+ writer.add_scalar("charts/episodic_length", item["episode"]["l"], global_step)
+ break
+
+ # bootstrap value if not done
+ with torch.no_grad():
+ next_value = agent.get_value(next_obs).reshape(1, -1)
+ if args.gae:
+ advantages = torch.zeros_like(rewards).to(device)
+ lastgaelam = 0
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ nextvalues = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ nextvalues = values[t + 1]
+ delta = rewards[t] + args.gamma * nextvalues * nextnonterminal - values[t]
+ advantages[t] = lastgaelam = delta + args.gamma * args.gae_lambda * nextnonterminal * lastgaelam
+ returns = advantages + values
+ else:
+ returns = torch.zeros_like(rewards).to(device)
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ next_return = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ next_return = returns[t + 1]
+ returns[t] = rewards[t] + args.gamma * nextnonterminal * next_return
+ advantages = returns - values
+
+ # flatten the batch
+ b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
+ b_logprobs = logprobs.reshape(-1)
+ b_actions = actions.reshape((-1,) + envs.single_action_space.shape)
+ b_advantages = advantages.reshape(-1)
+ b_returns = returns.reshape(-1)
+ b_values = values.reshape(-1)
+
+ # Optimizing the policy and value network
+ b_inds = np.arange(args.batch_size)
+ clipfracs = []
+ for epoch in range(args.update_epochs):
+ np.random.shuffle(b_inds)
+ for start in range(0, args.batch_size, args.minibatch_size):
+ end = start + args.minibatch_size
+ mb_inds = b_inds[start:end]
+
+ _, newlogprob, entropy, newvalue = agent.get_action_and_value(
+ b_obs[mb_inds], b_actions.long()[mb_inds]
+ )
+ logratio = newlogprob - b_logprobs[mb_inds]
+ ratio = logratio.exp()
+
+ with torch.no_grad():
+ # calculate approx_kl http://joschu.net/blog/kl-approx.html
+ old_approx_kl = (-logratio).mean()
+ approx_kl = ((ratio - 1) - logratio).mean()
+ clipfracs += [((ratio - 1.0).abs() > args.clip_coef).float().mean().item()]
+
+ mb_advantages = b_advantages[mb_inds]
+ if args.norm_adv:
+ mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
+
+ # Policy loss
+ pg_loss1 = -mb_advantages * ratio
+ pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - args.clip_coef, 1 + args.clip_coef)
+ pg_loss = torch.max(pg_loss1, pg_loss2).mean()
+
+ # Value loss
+ newvalue = newvalue.view(-1)
+ if args.clip_vloss:
+ v_loss_unclipped = (newvalue - b_returns[mb_inds]) ** 2
+ v_clipped = b_values[mb_inds] + torch.clamp(
+ newvalue - b_values[mb_inds],
+ -args.clip_coef,
+ args.clip_coef,
+ )
+ v_loss_clipped = (v_clipped - b_returns[mb_inds]) ** 2
+ v_loss_max = torch.max(v_loss_unclipped, v_loss_clipped)
+ v_loss = 0.5 * v_loss_max.mean()
+ else:
+ v_loss = 0.5 * ((newvalue - b_returns[mb_inds]) ** 2).mean()
+
+ entropy_loss = entropy.mean()
+ loss = pg_loss - args.ent_coef * entropy_loss + v_loss * args.vf_coef
+
+ optimizer.zero_grad()
+ loss.backward()
+ nn.utils.clip_grad_norm_(agent.parameters(), args.max_grad_norm)
+ optimizer.step()
+
+ if args.target_kl is not None:
+ if approx_kl > args.target_kl:
+ break
+
+ y_pred, y_true = b_values.cpu().numpy(), b_returns.cpu().numpy()
+ var_y = np.var(y_true)
+ explained_var = np.nan if var_y == 0 else 1 - np.var(y_true - y_pred) / var_y
+
+ # TRY NOT TO MODIFY: record rewards for plotting purposes
+ writer.add_scalar("charts/learning_rate", optimizer.param_groups[0]["lr"], global_step)
+ writer.add_scalar("losses/value_loss", v_loss.item(), global_step)
+ writer.add_scalar("losses/policy_loss", pg_loss.item(), global_step)
+ writer.add_scalar("losses/entropy", entropy_loss.item(), global_step)
+ writer.add_scalar("losses/old_approx_kl", old_approx_kl.item(), global_step)
+ writer.add_scalar("losses/approx_kl", approx_kl.item(), global_step)
+ writer.add_scalar("losses/clipfrac", np.mean(clipfracs), global_step)
+ writer.add_scalar("losses/explained_variance", explained_var, global_step)
+ print("SPS:", int(global_step / (time.time() - start_time)))
+ writer.add_scalar("charts/SPS", int(global_step / (time.time() - start_time)), global_step)
+
+ envs.close()
+ writer.close()
+
+ # Create the evaluation environment
+ eval_env = gym.make(args.env_id)
+
+ package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+ )
+```
+
+To be able to share your model with the community there are three more steps to follow:
+
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
+
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
+- Create a new token (https://huggingface.co/settings/tokens) **with write role**
+
+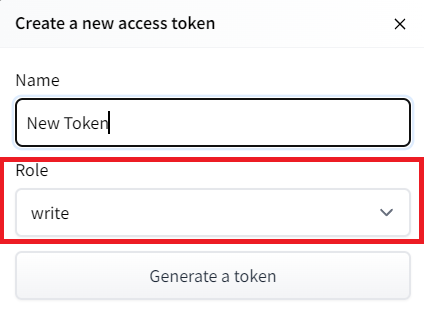 +
+- Copy the token
+- Run the cell below and paste the token
+
+```python
+from huggingface_hub import notebook_login
+notebook_login()
+!git config --global credential.helper store
+```
+
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+
+## Let's start the training 🔥
+- Now that you've coded from scratch PPO and added the Hugging Face Integration, we're ready to start the training 🔥
+
+- First, you need to copy all your code to a file you create called `ppo.py`
+
+
+
+- Copy the token
+- Run the cell below and paste the token
+
+```python
+from huggingface_hub import notebook_login
+notebook_login()
+!git config --global credential.helper store
+```
+
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+
+## Let's start the training 🔥
+- Now that you've coded from scratch PPO and added the Hugging Face Integration, we're ready to start the training 🔥
+
+- First, you need to copy all your code to a file you create called `ppo.py`
+
+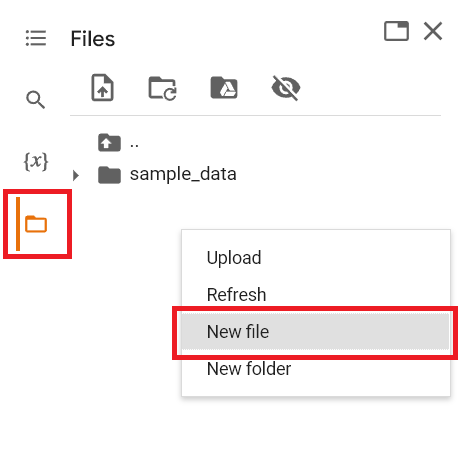 +
+
+
+ +
+- Now we just need to run this python script using `python .py` with the additional parameters we defined with `argparse`
+
+- You should modify more hyperparameters otherwise the training will not be super stable.
+
+```python
+!python ppo.py --env-id="LunarLander-v2" --repo-id="YOUR_REPO_ID" --total-timesteps=50000
+```
+
+## Some additional challenges 🏆
+The best way to learn **is to try things by your own**! Why not trying another environment?
+
+
+See you on Unit 8, part 2 where we going to train agents to play Doom 🔥
+## Keep learning, stay awesome 🤗
\ No newline at end of file
diff --git a/units/en/unit8/hands-on-cleanrl.mdx b/units/en/unit8/hands-on-cleanrl.mdx
index d23b907..4e0e85e 100644
--- a/units/en/unit8/hands-on-cleanrl.mdx
+++ b/units/en/unit8/hands-on-cleanrl.mdx
@@ -1,5 +1,14 @@
# Hands-on
+
+
+
+
+
Now that we studied the theory behind PPO, the best way to understand how it works **is to implement it from scratch.**
Implementing an architecture from scratch is the best way to understand it, and it's a good habit. We have already done it for a value-based method with Q-Learning and a Policy-based method with Reinforce.
@@ -8,9 +17,8 @@ So, to be able to code it, we're going to use two resources:
- A tutorial made by [Costa Huang](https://github.com/vwxyzjn). Costa is behind [CleanRL](https://github.com/vwxyzjn/cleanrl), a Deep Reinforcement Learning library that provides high-quality single-file implementation with research-friendly features.
- In addition to the tutorial, to go deeper, you can read the 13 core implementation details: [https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/](https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/)
-Then, to test its robustness, we're going to train it in 2 different classical environments:
+Then, to test its robustness, we're going to train it in:
-- [Cartpole-v1](https://www.gymlibrary.ml/environments/classic_control/cart_pole/?highlight=cartpole)
- [LunarLander-v2](https://www.gymlibrary.ml/environments/box2d/lunar_lander/)
@@ -30,3 +38,1045 @@ LunarLander-v2 is the first environment you used when you started this course. A
+
+- Now we just need to run this python script using `python .py` with the additional parameters we defined with `argparse`
+
+- You should modify more hyperparameters otherwise the training will not be super stable.
+
+```python
+!python ppo.py --env-id="LunarLander-v2" --repo-id="YOUR_REPO_ID" --total-timesteps=50000
+```
+
+## Some additional challenges 🏆
+The best way to learn **is to try things by your own**! Why not trying another environment?
+
+
+See you on Unit 8, part 2 where we going to train agents to play Doom 🔥
+## Keep learning, stay awesome 🤗
\ No newline at end of file
diff --git a/units/en/unit8/hands-on-cleanrl.mdx b/units/en/unit8/hands-on-cleanrl.mdx
index d23b907..4e0e85e 100644
--- a/units/en/unit8/hands-on-cleanrl.mdx
+++ b/units/en/unit8/hands-on-cleanrl.mdx
@@ -1,5 +1,14 @@
# Hands-on
+
+
+
+
+
Now that we studied the theory behind PPO, the best way to understand how it works **is to implement it from scratch.**
Implementing an architecture from scratch is the best way to understand it, and it's a good habit. We have already done it for a value-based method with Q-Learning and a Policy-based method with Reinforce.
@@ -8,9 +17,8 @@ So, to be able to code it, we're going to use two resources:
- A tutorial made by [Costa Huang](https://github.com/vwxyzjn). Costa is behind [CleanRL](https://github.com/vwxyzjn/cleanrl), a Deep Reinforcement Learning library that provides high-quality single-file implementation with research-friendly features.
- In addition to the tutorial, to go deeper, you can read the 13 core implementation details: [https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/](https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/)
-Then, to test its robustness, we're going to train it in 2 different classical environments:
+Then, to test its robustness, we're going to train it in:
-- [Cartpole-v1](https://www.gymlibrary.ml/environments/classic_control/cart_pole/?highlight=cartpole)
- [LunarLander-v2](https://www.gymlibrary.ml/environments/box2d/lunar_lander/)
@@ -30,3 +38,1045 @@ LunarLander-v2 is the first environment you used when you started this course. A
via GIPHY
Let's get started! 🚀
+
+
+
+
+# Unit 8: Proximal Policy Gradient (PPO) with PyTorch 🤖
+
+
+
+
+In this notebook, you'll learn to **code your PPO agent from scratch with PyTorch using CleanRL implementation as model**.
+
+To test its robustness, we're going to train it in:
+
+- [LunarLander-v2 🚀](https://www.gymlibrary.dev/environments/box2d/lunar_lander/)
+
+We're constantly trying to improve our tutorials, so **if you find some issues in this notebook**, please [open an issue on the GitHub Repo](https://github.com/huggingface/deep-rl-class/issues).
+
+## Objectives of this notebook 🏆
+
+At the end of the notebook, you will:
+
+- Be able to **code your PPO agent from scratch using PyTorch**.
+- Be able to **push your trained agent and the code to the Hub** with a nice video replay and an evaluation score 🔥.
+
+
+## Prerequisites 🏗️
+
+Before diving into the notebook, you need to:
+
+🔲 📚 Study [PPO by reading Unit 8](https://huggingface.co/deep-rl-course/unit8/introduction) 🤗
+
+To validate this hands-on for the [certification process](https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process), you need to push one model, we don't ask for a minimal result but we **advise you to try different hyperparameters settings to get better results**.
+
+If you don't find your model, **go to the bottom of the page and click on the refresh button**
+
+For more information about the certification process, check this section 👉 https://huggingface.co/deep-rl-course/en/unit0/introduction#certification-process
+
+## Set the GPU 💪
+
+- To **accelerate the agent's training, we'll use a GPU**. To do that, go to `Runtime > Change Runtime type`
+
+
+
+- `Hardware Accelerator > GPU`
+
+
+
+## Create a virtual display 🔽
+
+During the notebook, we'll need to generate a replay video. To do so, with colab, **we need to have a virtual screen to be able to render the environment** (and thus record the frames).
+
+Hence the following cell will install the librairies and create and run a virtual screen 🖥
+
+```python
+apt install python-opengl
+apt install ffmpeg
+apt install xvfb
+pip install pyglet==1.5
+pip install pyvirtualdisplay
+```
+
+```python
+# Virtual display
+from pyvirtualdisplay import Display
+
+virtual_display = Display(visible=0, size=(1400, 900))
+virtual_display.start()
+```
+
+## Install dependencies 🔽
+For this exercise, we use `gym==0.21`
+
+```python
+pip install gym==0.21
+pip install imageio-ffmpeg
+pip install huggingface_hub
+pip install box2d
+```
+
+## Let's code PPO from scratch with Costa Huang tutorial
+- For the core implementation of PPO we're going to use the excellent [Costa Huang](https://costa.sh/) tutorial.
+- In addition to the tutorial, to go deeper you can read the 37 core implementation details: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/
+
+👉 The video tutorial: https://youtu.be/MEt6rrxH8W4
+
+```python
+from IPython.display import HTML
+
+HTML(
+ ''
+)
+```
+
+## Add the Hugging Face Integration 🤗
+- In order to push our model to the Hub, we need to define a function `package_to_hub`
+
+- Add dependencies we need to push our model to the Hub
+
+```python
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+```
+
+- Add new argument in `parse_args()` function to define the repo-id where we want to push the model.
+
+```python
+# Adding HuggingFace argument
+parser.add_argument(
+ "--repo-id",
+ type=str,
+ default="ThomasSimonini/ppo-CartPole-v1",
+ help="id of the model repository from the Hugging Face Hub {username/repo_name}",
+)
+```
+
+- Next, we add the methods needed to push the model to the Hub
+
+- These methods will:
+ - `_evalutate_agent()`: evaluate the agent.
+ - `_generate_model_card()`: generate the model card of your agent.
+ - `_record_video()`: record a video of your agent.
+
+```python
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+```
+
+- Finally, we call this function at the end of the PPO training
+
+```python
+# Create the evaluation environment
+eval_env = gym.make(args.env_id)
+
+package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+)
+```
+
+- Here's what look the ppo.py final file
+
+```python
+# docs and experiment results can be found at https://docs.cleanrl.dev/rl-algorithms/ppo/#ppopy
+
+import argparse
+import os
+import random
+import time
+from distutils.util import strtobool
+
+import gym
+import numpy as np
+import torch
+import torch.nn as nn
+import torch.optim as optim
+from torch.distributions.categorical import Categorical
+from torch.utils.tensorboard import SummaryWriter
+
+from huggingface_hub import HfApi, upload_folder
+from huggingface_hub.repocard import metadata_eval_result, metadata_save
+
+from pathlib import Path
+import datetime
+import tempfile
+import json
+import shutil
+import imageio
+
+from wasabi import Printer
+
+msg = Printer()
+
+
+def parse_args():
+ # fmt: off
+ parser = argparse.ArgumentParser()
+ parser.add_argument("--exp-name", type=str, default=os.path.basename(__file__).rstrip(".py"),
+ help="the name of this experiment")
+ parser.add_argument("--seed", type=int, default=1,
+ help="seed of the experiment")
+ parser.add_argument("--torch-deterministic", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, `torch.backends.cudnn.deterministic=False`")
+ parser.add_argument("--cuda", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="if toggled, cuda will be enabled by default")
+ parser.add_argument("--track", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="if toggled, this experiment will be tracked with Weights and Biases")
+ parser.add_argument("--wandb-project-name", type=str, default="cleanRL",
+ help="the wandb's project name")
+ parser.add_argument("--wandb-entity", type=str, default=None,
+ help="the entity (team) of wandb's project")
+ parser.add_argument("--capture-video", type=lambda x: bool(strtobool(x)), default=False, nargs="?", const=True,
+ help="weather to capture videos of the agent performances (check out `videos` folder)")
+
+ # Algorithm specific arguments
+ parser.add_argument("--env-id", type=str, default="CartPole-v1",
+ help="the id of the environment")
+ parser.add_argument("--total-timesteps", type=int, default=50000,
+ help="total timesteps of the experiments")
+ parser.add_argument("--learning-rate", type=float, default=2.5e-4,
+ help="the learning rate of the optimizer")
+ parser.add_argument("--num-envs", type=int, default=4,
+ help="the number of parallel game environments")
+ parser.add_argument("--num-steps", type=int, default=128,
+ help="the number of steps to run in each environment per policy rollout")
+ parser.add_argument("--anneal-lr", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggle learning rate annealing for policy and value networks")
+ parser.add_argument("--gae", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Use GAE for advantage computation")
+ parser.add_argument("--gamma", type=float, default=0.99,
+ help="the discount factor gamma")
+ parser.add_argument("--gae-lambda", type=float, default=0.95,
+ help="the lambda for the general advantage estimation")
+ parser.add_argument("--num-minibatches", type=int, default=4,
+ help="the number of mini-batches")
+ parser.add_argument("--update-epochs", type=int, default=4,
+ help="the K epochs to update the policy")
+ parser.add_argument("--norm-adv", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles advantages normalization")
+ parser.add_argument("--clip-coef", type=float, default=0.2,
+ help="the surrogate clipping coefficient")
+ parser.add_argument("--clip-vloss", type=lambda x: bool(strtobool(x)), default=True, nargs="?", const=True,
+ help="Toggles whether or not to use a clipped loss for the value function, as per the paper.")
+ parser.add_argument("--ent-coef", type=float, default=0.01,
+ help="coefficient of the entropy")
+ parser.add_argument("--vf-coef", type=float, default=0.5,
+ help="coefficient of the value function")
+ parser.add_argument("--max-grad-norm", type=float, default=0.5,
+ help="the maximum norm for the gradient clipping")
+ parser.add_argument("--target-kl", type=float, default=None,
+ help="the target KL divergence threshold")
+
+ # Adding HuggingFace argument
+ parser.add_argument("--repo-id", type=str, default="ThomasSimonini/ppo-CartPole-v1", help="id of the model repository from the Hugging Face Hub {username/repo_name}")
+
+ args = parser.parse_args()
+ args.batch_size = int(args.num_envs * args.num_steps)
+ args.minibatch_size = int(args.batch_size // args.num_minibatches)
+ # fmt: on
+ return args
+
+
+def package_to_hub(
+ repo_id,
+ model,
+ hyperparameters,
+ eval_env,
+ video_fps=30,
+ commit_message="Push agent to the Hub",
+ token=None,
+ logs=None,
+):
+ """
+ Evaluate, Generate a video and Upload a model to Hugging Face Hub.
+ This method does the complete pipeline:
+ - It evaluates the model
+ - It generates the model card
+ - It generates a replay video of the agent
+ - It pushes everything to the hub
+ :param repo_id: id of the model repository from the Hugging Face Hub
+ :param model: trained model
+ :param eval_env: environment used to evaluate the agent
+ :param fps: number of fps for rendering the video
+ :param commit_message: commit message
+ :param logs: directory on local machine of tensorboard logs you'd like to upload
+ """
+ msg.info(
+ "This function will save, evaluate, generate a video of your agent, "
+ "create a model card and push everything to the hub. "
+ "It might take up to 1min. \n "
+ "This is a work in progress: if you encounter a bug, please open an issue."
+ )
+ # Step 1: Clone or create the repo
+ repo_url = HfApi().create_repo(
+ repo_id=repo_id,
+ token=token,
+ private=False,
+ exist_ok=True,
+ )
+
+ with tempfile.TemporaryDirectory() as tmpdirname:
+ tmpdirname = Path(tmpdirname)
+
+ # Step 2: Save the model
+ torch.save(model.state_dict(), tmpdirname / "model.pt")
+
+ # Step 3: Evaluate the model and build JSON
+ mean_reward, std_reward = _evaluate_agent(eval_env, 10, model)
+
+ # First get datetime
+ eval_datetime = datetime.datetime.now()
+ eval_form_datetime = eval_datetime.isoformat()
+
+ evaluate_data = {
+ "env_id": hyperparameters.env_id,
+ "mean_reward": mean_reward,
+ "std_reward": std_reward,
+ "n_evaluation_episodes": 10,
+ "eval_datetime": eval_form_datetime,
+ }
+
+ # Write a JSON file
+ with open(tmpdirname / "results.json", "w") as outfile:
+ json.dump(evaluate_data, outfile)
+
+ # Step 4: Generate a video
+ video_path = tmpdirname / "replay.mp4"
+ record_video(eval_env, model, video_path, video_fps)
+
+ # Step 5: Generate the model card
+ generated_model_card, metadata = _generate_model_card(
+ "PPO", hyperparameters.env_id, mean_reward, std_reward, hyperparameters
+ )
+ _save_model_card(tmpdirname, generated_model_card, metadata)
+
+ # Step 6: Add logs if needed
+ if logs:
+ _add_logdir(tmpdirname, Path(logs))
+
+ msg.info(f"Pushing repo {repo_id} to the Hugging Face Hub")
+
+ repo_url = upload_folder(
+ repo_id=repo_id,
+ folder_path=tmpdirname,
+ path_in_repo="",
+ commit_message=commit_message,
+ token=token,
+ )
+
+ msg.info(f"Your model is pushed to the Hub. You can view your model here: {repo_url}")
+ return repo_url
+
+
+def _evaluate_agent(env, n_eval_episodes, policy):
+ """
+ Evaluate the agent for ``n_eval_episodes`` episodes and returns average reward and std of reward.
+ :param env: The evaluation environment
+ :param n_eval_episodes: Number of episode to evaluate the agent
+ :param policy: The agent
+ """
+ episode_rewards = []
+ for episode in range(n_eval_episodes):
+ state = env.reset()
+ step = 0
+ done = False
+ total_rewards_ep = 0
+
+ while done is False:
+ state = torch.Tensor(state).to(device)
+ action, _, _, _ = policy.get_action_and_value(state)
+ new_state, reward, done, info = env.step(action.cpu().numpy())
+ total_rewards_ep += reward
+ if done:
+ break
+ state = new_state
+ episode_rewards.append(total_rewards_ep)
+ mean_reward = np.mean(episode_rewards)
+ std_reward = np.std(episode_rewards)
+
+ return mean_reward, std_reward
+
+
+def record_video(env, policy, out_directory, fps=30):
+ images = []
+ done = False
+ state = env.reset()
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ while not done:
+ state = torch.Tensor(state).to(device)
+ # Take the action (index) that have the maximum expected future reward given that state
+ action, _, _, _ = policy.get_action_and_value(state)
+ state, reward, done, info = env.step(
+ action.cpu().numpy()
+ ) # We directly put next_state = state for recording logic
+ img = env.render(mode="rgb_array")
+ images.append(img)
+ imageio.mimsave(out_directory, [np.array(img) for i, img in enumerate(images)], fps=fps)
+
+
+def _generate_model_card(model_name, env_id, mean_reward, std_reward, hyperparameters):
+ """
+ Generate the model card for the Hub
+ :param model_name: name of the model
+ :env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ :hyperparameters: training arguments
+ """
+ # Step 1: Select the tags
+ metadata = generate_metadata(model_name, env_id, mean_reward, std_reward)
+
+ # Transform the hyperparams namespace to string
+ converted_dict = vars(hyperparameters)
+ converted_str = str(converted_dict)
+ converted_str = converted_str.split(", ")
+ converted_str = "\n".join(converted_str)
+
+ # Step 2: Generate the model card
+ model_card = f"""
+ # PPO Agent Playing {env_id}
+
+ This is a trained model of a PPO agent playing {env_id}.
+
+ # Hyperparameters
+ ```python
+ {converted_str}
+ ```
+ """
+ return model_card, metadata
+
+
+def generate_metadata(model_name, env_id, mean_reward, std_reward):
+ """
+ Define the tags for the model card
+ :param model_name: name of the model
+ :param env_id: name of the environment
+ :mean_reward: mean reward of the agent
+ :std_reward: standard deviation of the mean reward of the agent
+ """
+ metadata = {}
+ metadata["tags"] = [
+ env_id,
+ "ppo",
+ "deep-reinforcement-learning",
+ "reinforcement-learning",
+ "custom-implementation",
+ "deep-rl-course",
+ ]
+
+ # Add metrics
+ eval = metadata_eval_result(
+ model_pretty_name=model_name,
+ task_pretty_name="reinforcement-learning",
+ task_id="reinforcement-learning",
+ metrics_pretty_name="mean_reward",
+ metrics_id="mean_reward",
+ metrics_value=f"{mean_reward:.2f} +/- {std_reward:.2f}",
+ dataset_pretty_name=env_id,
+ dataset_id=env_id,
+ )
+
+ # Merges both dictionaries
+ metadata = {**metadata, **eval}
+
+ return metadata
+
+
+def _save_model_card(local_path, generated_model_card, metadata):
+ """Saves a model card for the repository.
+ :param local_path: repository directory
+ :param generated_model_card: model card generated by _generate_model_card()
+ :param metadata: metadata
+ """
+ readme_path = local_path / "README.md"
+ readme = ""
+ if readme_path.exists():
+ with readme_path.open("r", encoding="utf8") as f:
+ readme = f.read()
+ else:
+ readme = generated_model_card
+
+ with readme_path.open("w", encoding="utf-8") as f:
+ f.write(readme)
+
+ # Save our metrics to Readme metadata
+ metadata_save(readme_path, metadata)
+
+
+def _add_logdir(local_path: Path, logdir: Path):
+ """Adds a logdir to the repository.
+ :param local_path: repository directory
+ :param logdir: logdir directory
+ """
+ if logdir.exists() and logdir.is_dir():
+ # Add the logdir to the repository under new dir called logs
+ repo_logdir = local_path / "logs"
+
+ # Delete current logs if they exist
+ if repo_logdir.exists():
+ shutil.rmtree(repo_logdir)
+
+ # Copy logdir into repo logdir
+ shutil.copytree(logdir, repo_logdir)
+
+
+def make_env(env_id, seed, idx, capture_video, run_name):
+ def thunk():
+ env = gym.make(env_id)
+ env = gym.wrappers.RecordEpisodeStatistics(env)
+ if capture_video:
+ if idx == 0:
+ env = gym.wrappers.RecordVideo(env, f"videos/{run_name}")
+ env.seed(seed)
+ env.action_space.seed(seed)
+ env.observation_space.seed(seed)
+ return env
+
+ return thunk
+
+
+def layer_init(layer, std=np.sqrt(2), bias_const=0.0):
+ torch.nn.init.orthogonal_(layer.weight, std)
+ torch.nn.init.constant_(layer.bias, bias_const)
+ return layer
+
+
+class Agent(nn.Module):
+ def __init__(self, envs):
+ super().__init__()
+ self.critic = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 1), std=1.0),
+ )
+ self.actor = nn.Sequential(
+ layer_init(nn.Linear(np.array(envs.single_observation_space.shape).prod(), 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, 64)),
+ nn.Tanh(),
+ layer_init(nn.Linear(64, envs.single_action_space.n), std=0.01),
+ )
+
+ def get_value(self, x):
+ return self.critic(x)
+
+ def get_action_and_value(self, x, action=None):
+ logits = self.actor(x)
+ probs = Categorical(logits=logits)
+ if action is None:
+ action = probs.sample()
+ return action, probs.log_prob(action), probs.entropy(), self.critic(x)
+
+
+if __name__ == "__main__":
+ args = parse_args()
+ run_name = f"{args.env_id}__{args.exp_name}__{args.seed}__{int(time.time())}"
+ if args.track:
+ import wandb
+
+ wandb.init(
+ project=args.wandb_project_name,
+ entity=args.wandb_entity,
+ sync_tensorboard=True,
+ config=vars(args),
+ name=run_name,
+ monitor_gym=True,
+ save_code=True,
+ )
+ writer = SummaryWriter(f"runs/{run_name}")
+ writer.add_text(
+ "hyperparameters",
+ "|param|value|\n|-|-|\n%s" % ("\n".join([f"|{key}|{value}|" for key, value in vars(args).items()])),
+ )
+
+ # TRY NOT TO MODIFY: seeding
+ random.seed(args.seed)
+ np.random.seed(args.seed)
+ torch.manual_seed(args.seed)
+ torch.backends.cudnn.deterministic = args.torch_deterministic
+
+ device = torch.device("cuda" if torch.cuda.is_available() and args.cuda else "cpu")
+
+ # env setup
+ envs = gym.vector.SyncVectorEnv(
+ [make_env(args.env_id, args.seed + i, i, args.capture_video, run_name) for i in range(args.num_envs)]
+ )
+ assert isinstance(envs.single_action_space, gym.spaces.Discrete), "only discrete action space is supported"
+
+ agent = Agent(envs).to(device)
+ optimizer = optim.Adam(agent.parameters(), lr=args.learning_rate, eps=1e-5)
+
+ # ALGO Logic: Storage setup
+ obs = torch.zeros((args.num_steps, args.num_envs) + envs.single_observation_space.shape).to(device)
+ actions = torch.zeros((args.num_steps, args.num_envs) + envs.single_action_space.shape).to(device)
+ logprobs = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ rewards = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ dones = torch.zeros((args.num_steps, args.num_envs)).to(device)
+ values = torch.zeros((args.num_steps, args.num_envs)).to(device)
+
+ # TRY NOT TO MODIFY: start the game
+ global_step = 0
+ start_time = time.time()
+ next_obs = torch.Tensor(envs.reset()).to(device)
+ next_done = torch.zeros(args.num_envs).to(device)
+ num_updates = args.total_timesteps // args.batch_size
+
+ for update in range(1, num_updates + 1):
+ # Annealing the rate if instructed to do so.
+ if args.anneal_lr:
+ frac = 1.0 - (update - 1.0) / num_updates
+ lrnow = frac * args.learning_rate
+ optimizer.param_groups[0]["lr"] = lrnow
+
+ for step in range(0, args.num_steps):
+ global_step += 1 * args.num_envs
+ obs[step] = next_obs
+ dones[step] = next_done
+
+ # ALGO LOGIC: action logic
+ with torch.no_grad():
+ action, logprob, _, value = agent.get_action_and_value(next_obs)
+ values[step] = value.flatten()
+ actions[step] = action
+ logprobs[step] = logprob
+
+ # TRY NOT TO MODIFY: execute the game and log data.
+ next_obs, reward, done, info = envs.step(action.cpu().numpy())
+ rewards[step] = torch.tensor(reward).to(device).view(-1)
+ next_obs, next_done = torch.Tensor(next_obs).to(device), torch.Tensor(done).to(device)
+
+ for item in info:
+ if "episode" in item.keys():
+ print(f"global_step={global_step}, episodic_return={item['episode']['r']}")
+ writer.add_scalar("charts/episodic_return", item["episode"]["r"], global_step)
+ writer.add_scalar("charts/episodic_length", item["episode"]["l"], global_step)
+ break
+
+ # bootstrap value if not done
+ with torch.no_grad():
+ next_value = agent.get_value(next_obs).reshape(1, -1)
+ if args.gae:
+ advantages = torch.zeros_like(rewards).to(device)
+ lastgaelam = 0
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ nextvalues = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ nextvalues = values[t + 1]
+ delta = rewards[t] + args.gamma * nextvalues * nextnonterminal - values[t]
+ advantages[t] = lastgaelam = delta + args.gamma * args.gae_lambda * nextnonterminal * lastgaelam
+ returns = advantages + values
+ else:
+ returns = torch.zeros_like(rewards).to(device)
+ for t in reversed(range(args.num_steps)):
+ if t == args.num_steps - 1:
+ nextnonterminal = 1.0 - next_done
+ next_return = next_value
+ else:
+ nextnonterminal = 1.0 - dones[t + 1]
+ next_return = returns[t + 1]
+ returns[t] = rewards[t] + args.gamma * nextnonterminal * next_return
+ advantages = returns - values
+
+ # flatten the batch
+ b_obs = obs.reshape((-1,) + envs.single_observation_space.shape)
+ b_logprobs = logprobs.reshape(-1)
+ b_actions = actions.reshape((-1,) + envs.single_action_space.shape)
+ b_advantages = advantages.reshape(-1)
+ b_returns = returns.reshape(-1)
+ b_values = values.reshape(-1)
+
+ # Optimizing the policy and value network
+ b_inds = np.arange(args.batch_size)
+ clipfracs = []
+ for epoch in range(args.update_epochs):
+ np.random.shuffle(b_inds)
+ for start in range(0, args.batch_size, args.minibatch_size):
+ end = start + args.minibatch_size
+ mb_inds = b_inds[start:end]
+
+ _, newlogprob, entropy, newvalue = agent.get_action_and_value(
+ b_obs[mb_inds], b_actions.long()[mb_inds]
+ )
+ logratio = newlogprob - b_logprobs[mb_inds]
+ ratio = logratio.exp()
+
+ with torch.no_grad():
+ # calculate approx_kl http://joschu.net/blog/kl-approx.html
+ old_approx_kl = (-logratio).mean()
+ approx_kl = ((ratio - 1) - logratio).mean()
+ clipfracs += [((ratio - 1.0).abs() > args.clip_coef).float().mean().item()]
+
+ mb_advantages = b_advantages[mb_inds]
+ if args.norm_adv:
+ mb_advantages = (mb_advantages - mb_advantages.mean()) / (mb_advantages.std() + 1e-8)
+
+ # Policy loss
+ pg_loss1 = -mb_advantages * ratio
+ pg_loss2 = -mb_advantages * torch.clamp(ratio, 1 - args.clip_coef, 1 + args.clip_coef)
+ pg_loss = torch.max(pg_loss1, pg_loss2).mean()
+
+ # Value loss
+ newvalue = newvalue.view(-1)
+ if args.clip_vloss:
+ v_loss_unclipped = (newvalue - b_returns[mb_inds]) ** 2
+ v_clipped = b_values[mb_inds] + torch.clamp(
+ newvalue - b_values[mb_inds],
+ -args.clip_coef,
+ args.clip_coef,
+ )
+ v_loss_clipped = (v_clipped - b_returns[mb_inds]) ** 2
+ v_loss_max = torch.max(v_loss_unclipped, v_loss_clipped)
+ v_loss = 0.5 * v_loss_max.mean()
+ else:
+ v_loss = 0.5 * ((newvalue - b_returns[mb_inds]) ** 2).mean()
+
+ entropy_loss = entropy.mean()
+ loss = pg_loss - args.ent_coef * entropy_loss + v_loss * args.vf_coef
+
+ optimizer.zero_grad()
+ loss.backward()
+ nn.utils.clip_grad_norm_(agent.parameters(), args.max_grad_norm)
+ optimizer.step()
+
+ if args.target_kl is not None:
+ if approx_kl > args.target_kl:
+ break
+
+ y_pred, y_true = b_values.cpu().numpy(), b_returns.cpu().numpy()
+ var_y = np.var(y_true)
+ explained_var = np.nan if var_y == 0 else 1 - np.var(y_true - y_pred) / var_y
+
+ # TRY NOT TO MODIFY: record rewards for plotting purposes
+ writer.add_scalar("charts/learning_rate", optimizer.param_groups[0]["lr"], global_step)
+ writer.add_scalar("losses/value_loss", v_loss.item(), global_step)
+ writer.add_scalar("losses/policy_loss", pg_loss.item(), global_step)
+ writer.add_scalar("losses/entropy", entropy_loss.item(), global_step)
+ writer.add_scalar("losses/old_approx_kl", old_approx_kl.item(), global_step)
+ writer.add_scalar("losses/approx_kl", approx_kl.item(), global_step)
+ writer.add_scalar("losses/clipfrac", np.mean(clipfracs), global_step)
+ writer.add_scalar("losses/explained_variance", explained_var, global_step)
+ print("SPS:", int(global_step / (time.time() - start_time)))
+ writer.add_scalar("charts/SPS", int(global_step / (time.time() - start_time)), global_step)
+
+ envs.close()
+ writer.close()
+
+ # Create the evaluation environment
+ eval_env = gym.make(args.env_id)
+
+ package_to_hub(
+ repo_id=args.repo_id,
+ model=agent, # The model we want to save
+ hyperparameters=args,
+ eval_env=gym.make(args.env_id),
+ logs=f"runs/{run_name}",
+ )
+```
+
+To be able to share your model with the community there are three more steps to follow:
+
+1️⃣ (If it's not already done) create an account to HF ➡ https://huggingface.co/join
+
+2️⃣ Sign in and then, you need to store your authentication token from the Hugging Face website.
+- Create a new token (https://huggingface.co/settings/tokens) **with write role**
+
+
+
+- Copy the token
+- Run the cell below and paste the token
+
+```python
+from huggingface_hub import notebook_login
+notebook_login()
+!git config --global credential.helper store
+```
+
+If you don't want to use a Google Colab or a Jupyter Notebook, you need to use this command instead: `huggingface-cli login`
+
+## Let's start the training 🔥
+
+- Now that you've coded from scratch PPO and added the Hugging Face Integration, we're ready to start the training 🔥
+
+- First, you need to copy all your code to a file you create called `ppo.py`
+
+
+
+
+
+- Now we just need to run this python script using `python .py` with the additional parameters we defined with `argparse`
+
+- You should modify more hyperparameters otherwise the training will not be super stable.
+
+```python
+!python ppo.py --env-id="LunarLander-v2" --repo-id="YOUR_REPO_ID" --total-timesteps=50000
+```
+
+## Some additional challenges 🏆
+
+The best way to learn **is to try things by your own**! Why not trying another environment?
+
+See you on Unit 8, part 2 where we going to train agents to play Doom 🔥
+
+## Keep learning, stay awesome 🤗