4.6 KiB
Knowledge Check ✔️
The best way to learn and avoid the illusion of competence is to test yourself. This will help you to find where you need to reinforce your knowledge.
📝 Take a piece of paper and try to answer by writing, then check the solutions.
Q1: What are tabular methods?
Solution
Tabular methods are a type of problems in which the state and actions spaces are small enough to approximate value functions to be represented as arrays and tables. For instance, Q-Learning is a tabular method since we use a table to represent the state,action value pairs.
📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#from-q-learning-to-deep-q-learning
Q2: Why we can't use a classical Q-Learning to solve an Atari Game?
Solution
Atari environments have an observation space with a shape of (210, 160, 3), containing values ranging from 0 to 255, so that gives us 256^(210x160x3) = 256^100800 (for comparison, we have approximately 10^80 atoms in the observable universe).
Therefore, the state space is gigantic; hence creating and updating a Q-table for that environment would not be efficient. In this case, the best idea is to approximate the Q-values instead of a Q-table using a parametrized Q-function Q_{\theta}(s,a).
📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#from-q-learning-to-deep-q-learning
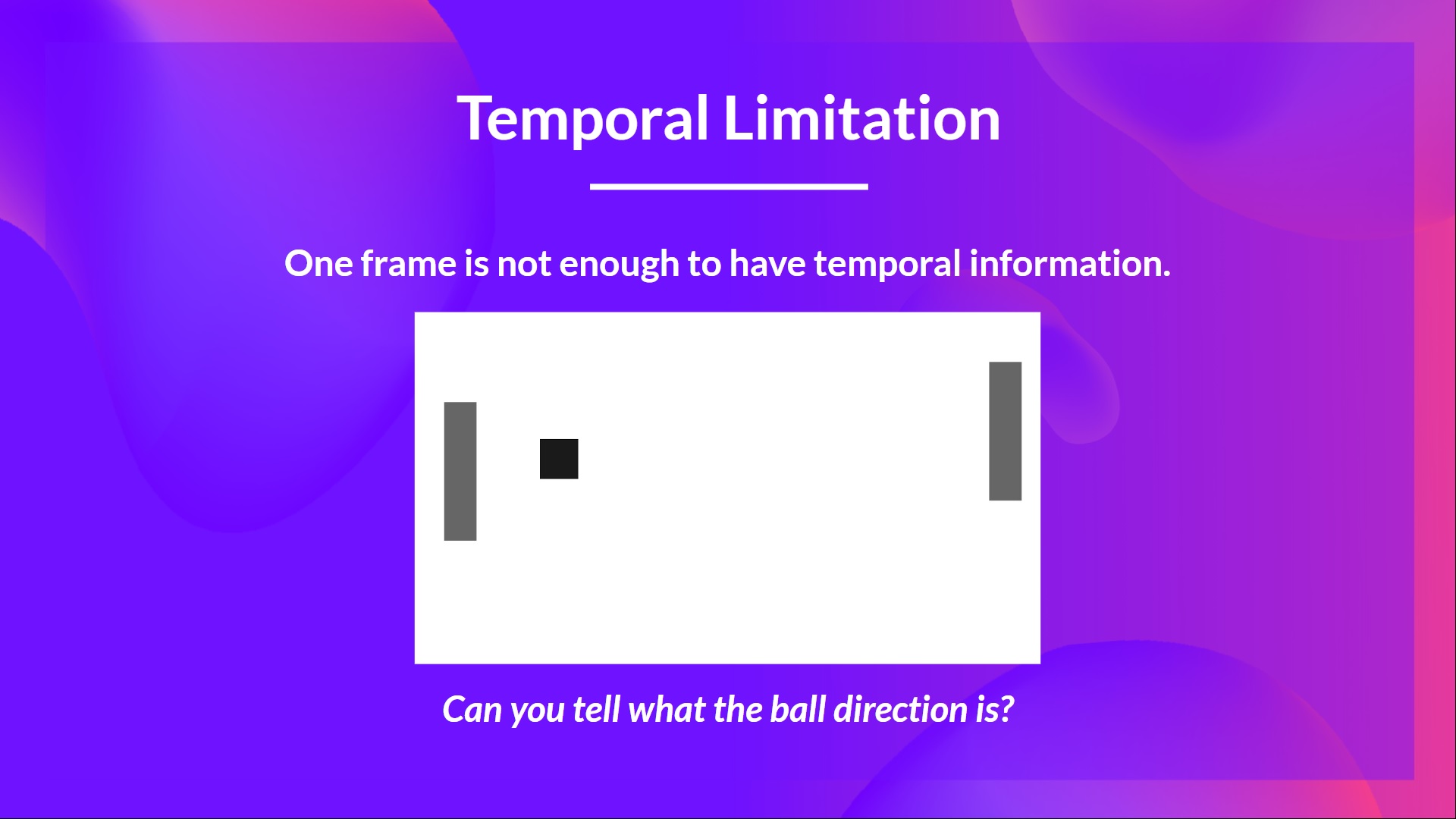
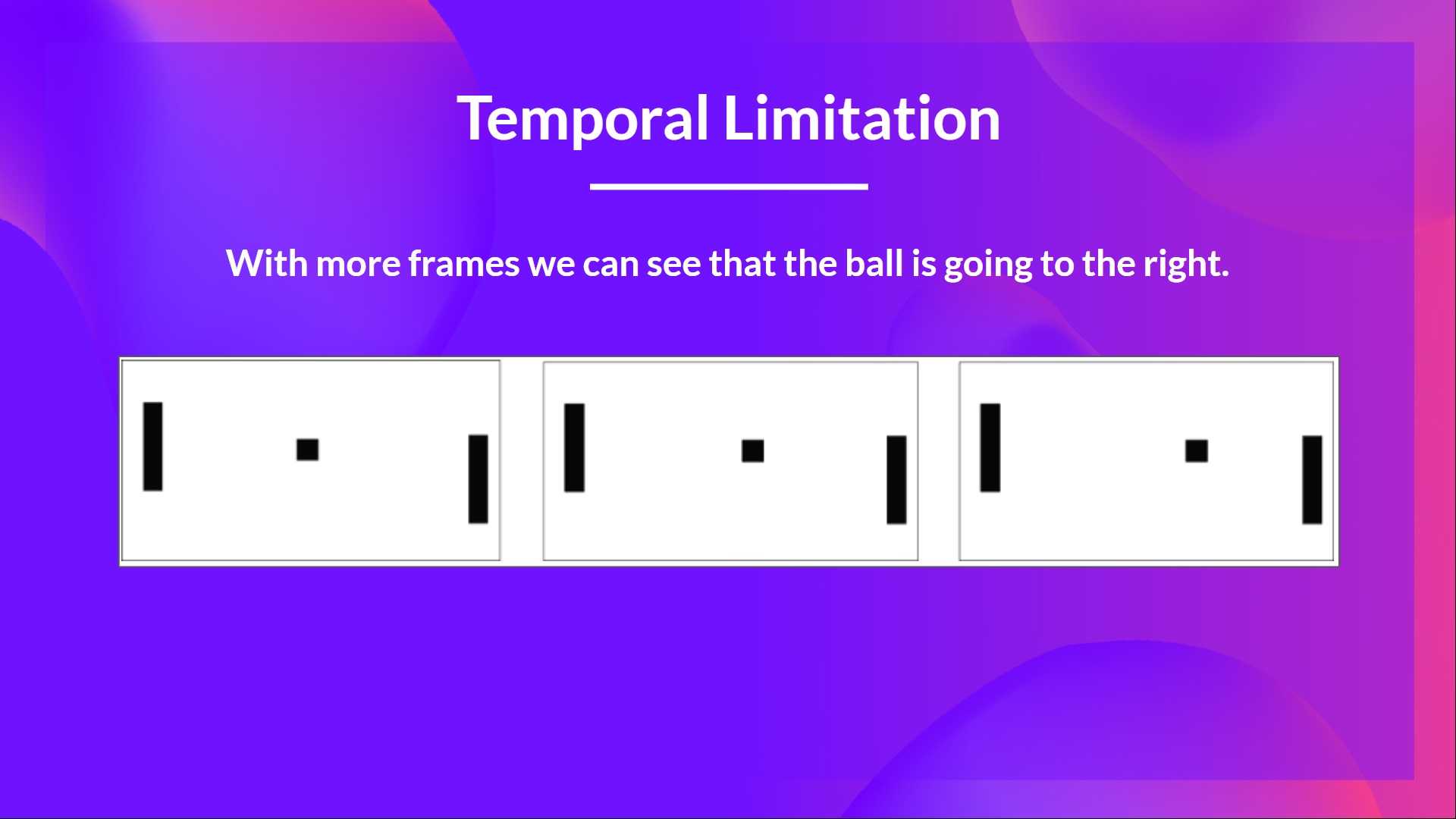
Q3: Why do we stack four frames together when we use frames as input in Deep Q-Learning?
Solution
We stack frames together because it helps us handle the problem of temporal limitation. Since one frame is not enough to capture temporal information. For instance, in pong, our agent will be unable to know the ball direction if it gets only one frame.
📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#preprocessing-the-input-and-temporal-limitation
Q4: What are the two phases of Deep Q-Learning?
Solution
The Deep Q-Learning training algorithm has two phases:
- Sampling : we perform actions and store the observed experiences tuples in a replay memory.
- Training : Select the small batch of tuple randomly and learn from it using a gradient descent update step.
📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#preprocessing-the-input-and-temporal-limitation
Q5: Why do we create a replay memory in Deep Q-Learning?
Solution
1. Make more efficient use of the experiences during the training
Usually, in online reinforcement learning, we interact in the environment, get experiences (state, action, reward, and next state), learn from them (update the neural network) and discard them. But with experience replay, we create a replay buffer that saves experience samples that we can reuse during the training.
2. Avoid forgetting previous experiences and reduce the correlation between experiences
The problem we get if we give sequential samples of experiences to our neural network is that it tends to forget the previous experiences as it overwrites new experiences. For instance, if we are in the first level and then the second, which is different, our agent can forget how to behave and play in the first level.
📖 If you don't remember, check 👉 https://huggingface.co/blog/deep-rl-dqn#experience-replay-to-make-more-efficient-use-of-experiences
Q6: How do we use Double Deep Q-Learning?
Solution
When we compute the Q target, we use two networks to decouple the action selection from the target Q value generation. We:
-
Use our DQN network to select the best action to take for the next state (the action with the highest Q value).
-
Use our Target network to calculate the target Q value of taking that action at the next state.
Congrats on finishing this Quiz 🥳, if you missed some elements, take time to read the chapter again to reinforce (😏) your knowledge.
Keep Learning, Stay Awesome