mirror of
https://github.com/youngyangyang04/leetcode-master.git
synced 2026-02-02 18:39:09 +08:00
Update
This commit is contained in:
@@ -158,16 +158,11 @@
|
||||
|
||||
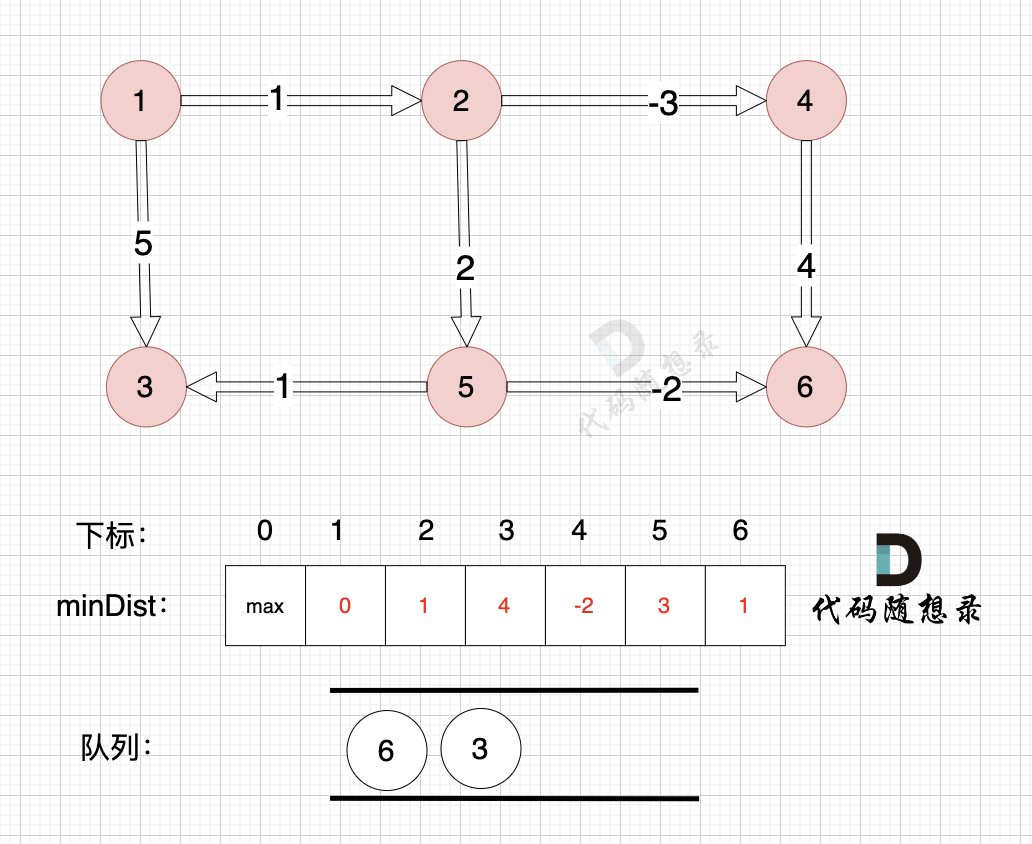
边:节点5 -> 节点6,权值为-2 ,minDist[6] > minDist[5] + (-2) ,更新 minDist[6] = minDist[5] + (-2) = 3 - 2 = 1
|
||||
|
||||
如图:
|
||||
如图,将节点3加入队列,因为节点6已经在队列里,所以不用重复添加
|
||||
|
||||

|
||||
|
||||
|
||||
|
||||
因为节点3 和 节点6 都曾经加入过队列,不用重复加入,避免重复计算。
|
||||
|
||||
在代码中我们可以用一个数组 visited 来记录入过队列的元素,加入过队列的元素,不再重复入队列。
|
||||
|
||||
|
||||
所以我们在加入队列的过程可以有一个优化,用visited数组记录已经加入队列的元素,已经在队列的元素不用重复加入
|
||||
|
||||
--------------
|
||||
|
||||
@@ -175,11 +170,12 @@
|
||||
|
||||
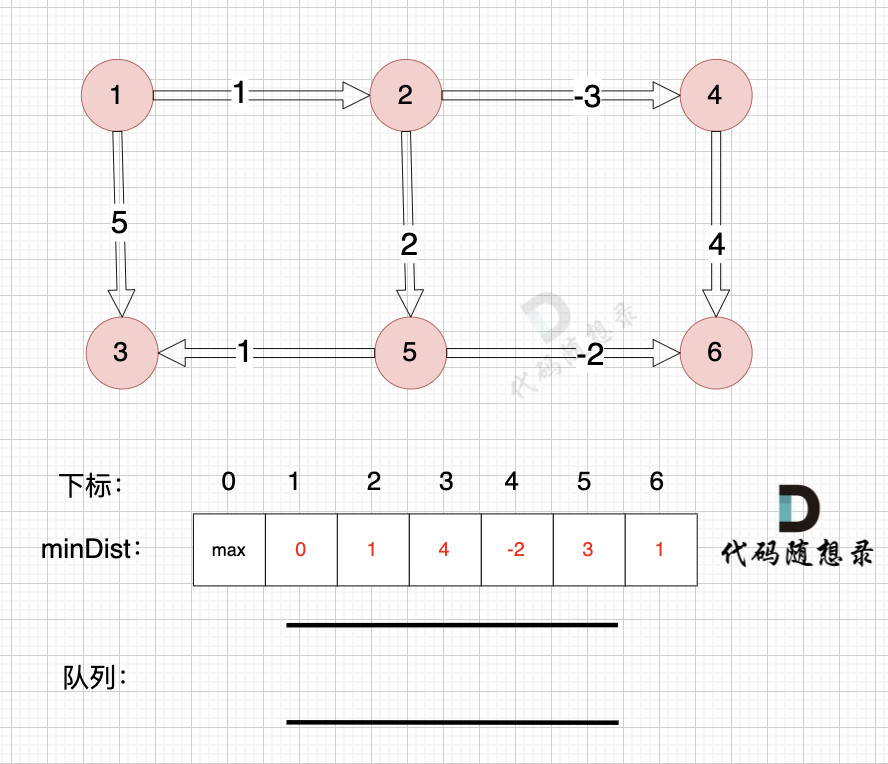
节点6作为终点,没有可以出发的边。
|
||||
|
||||
同理从队列中取出节点3,也没有可以出发的边
|
||||
|
||||
所以直接从队列中取出,如图:
|
||||
|
||||
|
||||
|
||||
|
||||
----------
|
||||
|
||||
这样我们就完成了基于队列优化的bellman_ford的算法模拟过程。
|
||||
@@ -190,12 +186,12 @@
|
||||
|
||||
在上面模拟过程中,我们每次都要知道 一个节点作为出发点连接了哪些节点。
|
||||
|
||||
如果想方便知道这些数据,就需要使用邻接表来存储这个图,如果对于邻接表不了解的话,可以看 [kama0047.参会dijkstra堆](./kama0047.参会dijkstra堆.md) 中 图的存储 部分。
|
||||
如果想方便知道这些数据,就需要使用邻接表来存储这个图,如果对于邻接表不了解的话,可以看 [kama0047.参会dijkstra堆](./0047.参会dijkstra堆.md) 中 图的存储 部分。
|
||||
|
||||
|
||||
整体代码如下:
|
||||
|
||||
```CPP
|
||||
```
|
||||
#include <iostream>
|
||||
#include <vector>
|
||||
#include <queue>
|
||||
@@ -215,7 +211,9 @@ int main() {
|
||||
int n, m, p1, p2, val;
|
||||
cin >> n >> m;
|
||||
|
||||
vector<list<Edge>> grid(n + 1); // 邻接表
|
||||
vector<list<Edge>> grid(n + 1);
|
||||
|
||||
vector<bool> isInQueue(n + 1); // 加入优化,已经在队里里的元素不用重复添加
|
||||
|
||||
// 将所有边保存起来
|
||||
for(int i = 0; i < m; i++){
|
||||
@@ -230,24 +228,26 @@ int main() {
|
||||
minDist[start] = 0;
|
||||
|
||||
queue<int> que;
|
||||
que.push(start); // 队列里放入起点
|
||||
que.push(start);
|
||||
|
||||
while (!que.empty()) {
|
||||
|
||||
int node = que.front(); que.pop();
|
||||
|
||||
isInQueue[node] = false; // 从队列里取出的时候,要取消标记
|
||||
for (Edge edge : grid[node]) {
|
||||
int from = node;
|
||||
int to = edge.to;
|
||||
int value = edge.val;
|
||||
if (minDist[to] > minDist[from] + value) { // 开始松弛
|
||||
minDist[to] = minDist[from] + value;
|
||||
que.push(to);
|
||||
minDist[to] = minDist[from] + value;
|
||||
if (isInQueue[to] == false) { // 已经在队列里的元素不用重复添加
|
||||
que.push(to);
|
||||
isInQueue[to] = true;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
if (minDist[end] == INT_MAX) cout << "unconnected" << endl; // 不能到达终点
|
||||
else cout << minDist[end] << endl; // 到达终点最短路径
|
||||
}
|
||||
|
||||
Reference in New Issue
Block a user