mirror of
https://github.com/Estom/notes.git
synced 2026-06-17 15:48:46 +08:00
minibatch
This commit is contained in:
@@ -199,6 +199,8 @@ $$\sigma = \sqrt{\frac{1}{m}\sum^m_{i=1}x^{{(i)}^2}}$$
|
||||
|
||||
## 梯度消失和梯度爆炸
|
||||
|
||||
### 梯度消失和梯度爆炸
|
||||
|
||||
* 在梯度函数上出现的以指数级递增或者递减的情况分别称为**梯度爆炸**或者**梯度消失**。
|
||||
|
||||
* 假定 $g(z) = z, b^{[l]} = 0$,对于目标输出有:
|
||||
@@ -214,27 +216,23 @@ $$\hat{y} = W^{[L]}W^{[L-1]}...W^{[2]}W^{[1]}X$$
|
||||
|
||||
$$z={w}_1{x}_1+{w}_2{x}_2 + ... + {w}_n{x}_n + b$$
|
||||
|
||||
* 当输入的数量 n 较大时,我们希望每个 wi 的值都小一些,这样它们的和得到的 z 也较小。
|
||||
|
||||
为了得到较小的 wi,设置`Var(wi)=1/n`,这里称为 **Xavier initialization**。
|
||||
* 当输入的数量 n 较大时,我们希望每个 wi 的值都小一些,这样它们的和得到的 z 也较小。为了得到较小的 wi,设置`Var(wi)=1/n`,这里称为 **Xavier initialization**。
|
||||
|
||||
```py
|
||||
WL = np.random.randn(WL.shape[0], WL.shape[1]) * np.sqrt(1/n)
|
||||
```
|
||||
|
||||
其中 n 是输入的神经元个数,即`WL.shape[1]`。
|
||||
* randn会生成标准正泰分布的样本,均值是0,方差是1。乘以$\sqrt{\frac{1}{n}}$,样本的方差会乘以$\frac{1}{n}$。其中 n 是某个神经元的输入神经元个数,即`WL.shape[1]`。
|
||||
|
||||
这样,激活函数的输入 x 近似设置成均值为 0,标准方差为 1,神经元输出 z 的方差就正则化到 1 了。虽然没有解决梯度消失和爆炸的问题,但其在一定程度上确实减缓了梯度消失和爆炸的速度。
|
||||
* 这样,激活函数的输入 x 近似设置成均值为 0,标准方差为 1,神经元输出 z 的方差就正则化到 1 了。虽然没有解决梯度消失和爆炸的问题,但其在一定程度上确实减缓了梯度消失和爆炸的速度。
|
||||
|
||||
同理,也有 **He Initialization**。它和 Xavier initialization 唯一的区别是`Var(wi)=2/n`,适用于 **ReLU** 作为激活函数时。
|
||||
|
||||
当激活函数使用 ReLU 时,`Var(wi)=2/n`;当激活函数使用 tanh 时,`Var(wi)=1/n`。
|
||||
* 同理,也有 **He Initialization**。它和 Xavier initialization 唯一的区别是`Var(wi)=2/n`,适用于 **ReLU** 作为激活函数时。当激活函数使用 ReLU 时,`Var(wi)=2/n`;当激活函数使用 tanh 时,`Var(wi)=1/n`。
|
||||
|
||||
## 梯度检验(Gradient checking)
|
||||
|
||||
### 梯度的数值逼近
|
||||
|
||||
使用双边误差的方法去逼近导数,精度要高于单边误差。
|
||||
* 使用双边误差的方法去逼近导数,精度要高于单边误差。
|
||||
|
||||
* 单边误差:
|
||||
|
||||
@@ -242,7 +240,7 @@ WL = np.random.randn(WL.shape[0], WL.shape[1]) * np.sqrt(1/n)
|
||||
|
||||
$$f'(\theta) = {\lim\_{\varepsilon\to 0}} = \frac{f(\theta + \varepsilon) - (\theta)}{\varepsilon}$$
|
||||
|
||||
误差:$O(\varepsilon)$
|
||||
* 误差:$O(\varepsilon)$
|
||||
|
||||
* 双边误差求导(即导数的定义):
|
||||
|
||||
@@ -250,45 +248,41 @@ $$f'(\theta) = {\lim\_{\varepsilon\to 0}} = \frac{f(\theta + \varepsilon) - (\th
|
||||
|
||||
$$f'(\theta) = {\lim\_{\varepsilon\to 0}} = \frac{f(\theta + \varepsilon) - (\theta - \varepsilon)}{2\varepsilon}$$
|
||||
|
||||
误差:$O(\varepsilon^2)$
|
||||
* 误差:$O(\varepsilon^2)$
|
||||
|
||||
当 ε 越小时,结果越接近真实的导数,也就是梯度值。可以使用这种方法来判断反向传播进行梯度下降时,是否出现了错误。
|
||||
* 当 ε 越小时,结果越接近真实的导数,也就是梯度值。可以使用这种方法来判断反向传播进行梯度下降时,是否出现了错误。
|
||||
|
||||
### 梯度检验的实施
|
||||
## 梯度检验的实施
|
||||
|
||||
#### 连接参数
|
||||
### 连接参数
|
||||
|
||||
将 $W^{[1]}$,$b^{[1]}$,...,$W^{[L]}$,$b^{[L]}$全部连接出来,成为一个巨型向量 θ。这样,
|
||||
* 将 $W^{[1]}$,$b^{[1]}$,...,$W^{[L]}$,$b^{[L]}$全部连接出来,成为一个巨型向量 θ。这样,
|
||||
|
||||
$$J(W^{[1]}, b^{[1]}, ..., W^{[L]},b^{[L]}) = J(\theta)$$
|
||||
|
||||
同时,对 $dW^{[1]}$,$db^{[1]}$,...,$dW^{[L]}$,$db^{[L]}$执行同样的操作得到巨型向量 dθ,它和 θ 有同样的维度。
|
||||
* 同时,对 $dW^{[1]}$,$db^{[1]}$,...,$dW^{[L]}$,$db^{[L]}$执行同样的操作得到巨型向量 dθ,它和 θ 有同样的维度。
|
||||
|
||||

|
||||
|
||||
现在,我们需要找到 dθ 和代价函数 J 的梯度的关系。
|
||||
* 现在,我们需要找到 dθ 和代价函数 J 的梯度的关系。
|
||||
|
||||
#### 进行梯度检验
|
||||
### 进行梯度检验
|
||||
|
||||
求得一个梯度逼近值
|
||||
* 求得一个梯度逼近值
|
||||
|
||||
$$d\theta_{approx}[i] = \frac{J(\theta\_1, \theta\_2, ..., \theta\_i+\varepsilon, ...) - J(\theta\_1, \theta\_2, ..., \theta\_i-\varepsilon, ...)}{2\varepsilon}$$
|
||||
|
||||
应该
|
||||
|
||||
$$\approx{d\theta[i]} = \frac{\partial J}{\partial \theta_i}$$
|
||||
|
||||
因此,我们用梯度检验值
|
||||
* 因此,我们用梯度检验值
|
||||
|
||||
$$\frac{{||d\theta\_{approx} - d\theta||}\_2}{{||d\theta\_{approx}||}\_2+{||d\theta||}\_2}$$
|
||||
$$\frac{{||d\theta_{approx} - d\theta||}_2}{{||d\theta_{approx}||}_2+{||d\theta||}_2}$$
|
||||
|
||||
检验反向传播的实施是否正确。其中,
|
||||
* 检验反向传播的实施是否正确。其中,
|
||||
|
||||
$${||x||}\_2 = \sum^N\_{i=1}{|x_i|}^2$$
|
||||
$${||x||}_2 = \sum^N_{i=1}{|x_i|}^2$$
|
||||
|
||||
表示向量 x 的 2-范数(也称“欧几里德范数”)。
|
||||
|
||||
如果梯度检验值和 ε 的值相近,说明神经网络的实施是正确的,否则要去检查代码是否存在 bug。
|
||||
* 表示向量 x 的 2-范数(也称“欧几里德范数”)。如果梯度检验值和 ε 的值相近,说明神经网络的实施是正确的,否则要去检查代码是否存在 bug。
|
||||
|
||||
### 在神经网络实施梯度检验的实用技巧和注意事项
|
||||
|
||||
|
||||
@@ -1,31 +1,34 @@
|
||||
<h1 align="center">优化算法</h1>
|
||||
# mini-batch优化算法
|
||||
|
||||
深度学习难以在大数据领域发挥最大效果的一个原因是,在巨大的数据集基础上进行训练速度很慢。而优化算法能够帮助快速训练模型,大大提高效率。
|
||||
> 深度学习难以在大数据领域发挥最大效果的一个原因是,在巨大的数据集基础上进行训练速度很慢。而优化算法能够帮助快速训练模型,大大提高效率。
|
||||
|
||||
## batch 梯度下降法
|
||||
## 1 mini-batch梯度下降方法
|
||||
### batch 梯度下降法
|
||||
|
||||
**batch 梯度下降法**(批梯度下降法,我们之前一直使用的梯度下降法)是最常用的梯度下降形式,即同时处理整个训练集。其在更新参数时使用所有的样本来进行更新。
|
||||
* **batch 梯度下降法**(批梯度下降法,我们之前一直使用的梯度下降法)是最常用的梯度下降形式,即同时处理整个训练集。其在更新参数时使用所有的样本来进行更新。
|
||||
|
||||
对整个训练集进行梯度下降法的时候,我们必须处理整个训练数据集,然后才能进行一步梯度下降,即每一步梯度下降法需要对整个训练集进行一次处理,如果训练数据集很大的时候,处理速度就会比较慢。
|
||||
* 对整个训练集进行梯度下降法的时候,我们必须处理整个训练数据集,然后才能进行一步梯度下降,即每一步梯度下降法需要对整个训练集进行一次处理,如果训练数据集很大的时候,处理速度就会比较慢。
|
||||
|
||||
但是如果每次处理训练数据的一部分即进行梯度下降法,则我们的算法速度会执行的更快。而处理的这些一小部分训练子集即称为 **mini-batch**。
|
||||
* 但是如果每次处理训练数据的一部分即进行梯度下降法,则我们的算法速度会执行的更快。而处理的这些一小部分训练子集即称为**mini-batch**。
|
||||
|
||||
## Mini-Batch 梯度下降法
|
||||
### Mini-Batch 梯度下降法
|
||||
|
||||
**Mini-Batch 梯度下降法**(小批量梯度下降法)每次同时处理单个的 mini-batch,其他与 batch 梯度下降法一致。
|
||||
* **Mini-Batch 梯度下降法**(小批量梯度下降法)每次同时处理单个的 mini-batch,其他与 batch 梯度下降法一致。
|
||||
|
||||
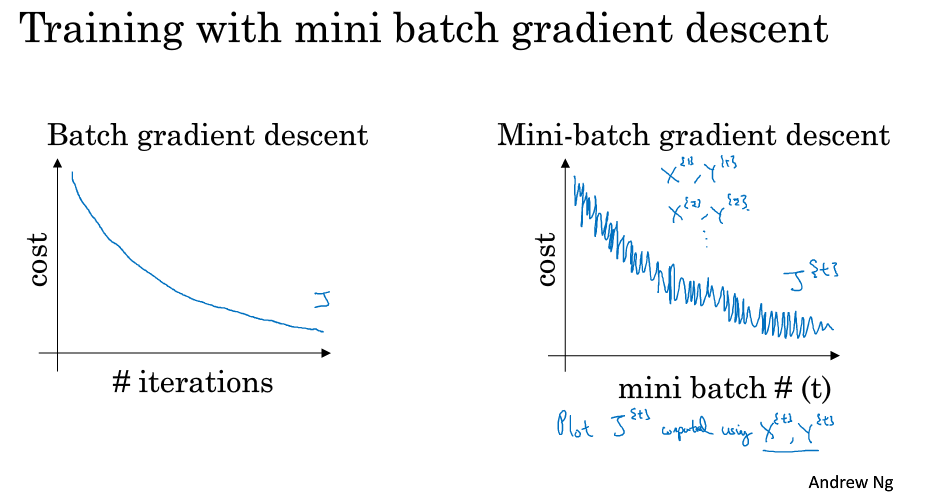
使用 batch 梯度下降法,对整个训练集的一次遍历只能做一个梯度下降;而使用 Mini-Batch 梯度下降法,对整个训练集的一次遍历(称为一个 epoch)能做 mini-batch 个数个梯度下降。之后,可以一直遍历训练集,直到最后收敛到一个合适的精度。
|
||||
* 使用 batch 梯度下降法,对整个训练集的一次遍历只能做一个梯度下降;而使用 Mini-Batch 梯度下降法,对整个训练集的一次遍历(称为一个 **epoch**)能做 mini-batch 个数个梯度下降。之后,可以一直遍历训练集,直到最后收敛到一个合适的精度。
|
||||
|
||||
batch 梯度下降法和 Mini-batch 梯度下降法代价函数的变化趋势如下:
|
||||
### 两者对比
|
||||
|
||||
|
||||
* batch 梯度下降法和 Mini-batch 梯度下降法代价函数的变化趋势如下:
|
||||
|
||||
### batch 的不同大小(size)带来的影响
|
||||

|
||||
|
||||
### batch-size带来的影响
|
||||
|
||||
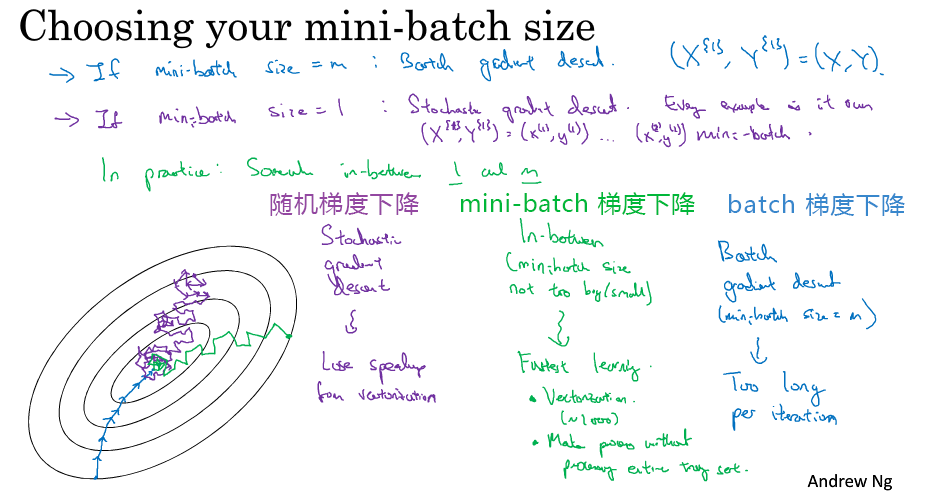
* mini-batch 的大小为 1,即是**随机梯度下降法(stochastic gradient descent)**,每个样本都是独立的 mini-batch;
|
||||
* mini-batch 的大小为 m(数据集大小),即是 batch 梯度下降法;
|
||||
|
||||
|
||||

|
||||
|
||||
* batch 梯度下降法:
|
||||
* 对所有 m 个训练样本执行一次梯度下降,**每一次迭代时间较长,训练过程慢**;
|
||||
@@ -37,7 +40,7 @@ batch 梯度下降法和 Mini-batch 梯度下降法代价函数的变化趋势
|
||||
* 有很多噪声,减小学习率可以适当;
|
||||
* 成本函数总体趋势向全局最小值靠近,但永远不会收敛,而是一直在最小值附近波动。
|
||||
|
||||
因此,选择一个`1 < size < m`的合适的大小进行 Mini-batch 梯度下降,可以实现快速学习,也应用了向量化带来的好处,且成本函数的下降处于前两者之间。
|
||||
> 因此,选择一个`1 < size < m`的合适的大小进行 Mini-batch 梯度下降,可以实现快速学习,也应用了向量化带来的好处,且成本函数的下降处于前两者之间。
|
||||
|
||||
### mini-batch 大小的选择
|
||||
|
||||
@@ -45,15 +48,13 @@ batch 梯度下降法和 Mini-batch 梯度下降法代价函数的变化趋势
|
||||
* 如果训练样本的大小比较大,选择 Mini-Batch 梯度下降法。为了和计算机的信息存储方式相适应,代码在 mini-batch 大小为 2 的幂次时运行要快一些。典型的大小为 $2^6$、$2^7$、...、$2^9$;
|
||||
* mini-batch 的大小要符合 CPU/GPU 内存。
|
||||
|
||||
mini-batch 的大小也是一个重要的超变量,需要根据经验快速尝试,找到能够最有效地减少成本函数的值。
|
||||
> mini-batch 的大小也是一个重要的超变量,需要根据经验快速尝试,找到能够最有效地减少成本函数的值。
|
||||
|
||||
### 获得 mini-batch 的步骤
|
||||
### mini-batch步骤
|
||||
|
||||
1. 将数据集打乱;
|
||||
2. 按照既定的大小分割数据集;
|
||||
|
||||
其中打乱数据集的代码:
|
||||
|
||||
```py
|
||||
m = X.shape[1]
|
||||
permutation = list(np.random.permutation(m))
|
||||
@@ -61,10 +62,9 @@ shuffled_X = X[:, permutation]
|
||||
shuffled_Y = Y[:, permutation].reshape((1,m))
|
||||
```
|
||||
|
||||
`np.random.permutation`与`np.random.shuffle`有两处不同:
|
||||
|
||||
1. 如果传给`permutation`一个矩阵,它会返回一个洗牌后的矩阵副本;而`shuffle`只是对一个矩阵进行洗牌,没有返回值。
|
||||
2. 如果传入一个整数,它会返回一个洗牌后的`arange`。
|
||||
* `np.random.permutation`与`np.random.shuffle`有两处不同:
|
||||
1. 如果传给`permutation`一个矩阵,它会返回一个洗牌后的矩阵副本;而`shuffle`只是对一个矩阵进行洗牌,没有返回值。
|
||||
2. 如果传入一个整数,它会返回一个洗牌后的`arange`。
|
||||
|
||||
### 符号表示
|
||||
|
||||
@@ -72,207 +72,187 @@ shuffled_Y = Y[:, permutation].reshape((1,m))
|
||||
* 使用上角中括号 l 表示神经网络的层数,$z^{[l]}$ 表示神经网络中第 l 层的 z 值;
|
||||
* 现在引入大括号 t 来代表不同的 mini-batch,因此有 $X^{t}$、$Y^{t}$。
|
||||
|
||||
## 指数平均加权
|
||||
## 2 指数平均加权
|
||||
|
||||
**指数加权平均(Exponentially Weight Average)**是一种常用的序列数据处理方式,计算公式为:
|
||||
### 指数加权平均定义
|
||||
|
||||
* **指数加权平均(Exponentially Weight Average)** 是一种常用的序列数据处理方式,计算公式为:
|
||||
|
||||
$$
|
||||
S\_t =
|
||||
S_t =
|
||||
\begin{cases}
|
||||
Y\_1, &t = 1 \\\\
|
||||
\beta S\_{t-1} + (1-\beta)Y_t, &t > 1
|
||||
Y_1, &t = 1 \\\\
|
||||
\beta S_{t-1} + (1-\beta)Y_t, &t > 1
|
||||
\end{cases}
|
||||
$$
|
||||
|
||||
其中 $Y\_t$ 为 t 下的实际值,$S\_t$ 为 t 下加权平均后的值,β 为权重值。
|
||||
* 其中 $Y_t$ 为 t 下的实际值,$S_t$ 为 t 下加权平均后的值,β 为权重值。指数加权平均数在统计学中被称为“指数加权移动平均值”。
|
||||
|
||||
指数加权平均数在统计学中被称为“指数加权移动平均值”。
|
||||

|
||||
|
||||
|
||||
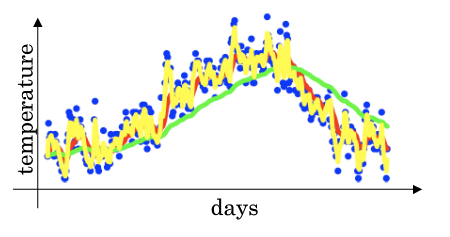
* 给定一个时间序列,例如伦敦一年每天的气温值,图中蓝色的点代表真实数据。对于一个即时的气温值,取权重值 β 为 0.9,根据求得的值可以得到图中的红色曲线,它反映了气温变化的大致趋势。
|
||||
|
||||
给定一个时间序列,例如伦敦一年每天的气温值,图中蓝色的点代表真实数据。对于一个即时的气温值,取权重值 β 为 0.9,根据求得的值可以得到图中的红色曲线,它反映了气温变化的大致趋势。
|
||||
|
||||
当取权重值 β=0.98 时,可以得到图中更为平滑的绿色曲线。而当取权重值 β=0.5 时,得到图中噪点更多的黄色曲线。**β 越大相当于求取平均利用的天数越多**,曲线自然就会越平滑而且越滞后。
|
||||
* 当取权重值 β=0.98 时,可以得到图中更为平滑的绿色曲线。而当取权重值 β=0.5 时,得到图中噪点更多的黄色曲线。**β 越大相当于求取平均利用的天数越多**,曲线自然就会越平滑而且越滞后。
|
||||
|
||||
### 理解指数平均加权
|
||||
|
||||
当 β 为 0.9 时,
|
||||
* 当 β 为 0.9 时,
|
||||
|
||||
$$v\_{100} = 0.9v\_{99} + 0.1 \theta\_{100}$$
|
||||
$$v_{100} = 0.9v_{99} + 0.1 \theta_{100}$$
|
||||
|
||||
$$v\_{99} = 0.9v\_{98} + 0.1 \theta\_{99}$$
|
||||
$$v_{99} = 0.9v_{98} + 0.1 \theta_{99}$$
|
||||
|
||||
$$v\_{98} = 0.9v\_{97} + 0.1 \theta\_{98}$$
|
||||
$$v_{98} = 0.9v_{97} + 0.1 \theta_{98}$$
|
||||
$$...$$
|
||||
|
||||
展开:
|
||||
$$v_{100} = 0.1 \theta_{100} + 0.1 * 0.9 \theta_{99} + 0.1 * {(0.9)}^2 \theta_{98} + ...$$
|
||||
|
||||
$$v\_{100} = 0.1 \theta\_{100} + 0.1 \* 0.9 \theta\_{99} + 0.1 \* {(0.9)}^2 \theta\_{98} + ...$$
|
||||
* 其中 θi 指第 i 天的实际数据。所有 θ 前面的系数(不包括 0.1)相加起来为 1 或者接近于 1,这些系数被称作**偏差修正(Bias Correction)**。
|
||||
|
||||
其中 θi 指第 i 天的实际数据。所有 θ 前面的系数(不包括 0.1)相加起来为 1 或者接近于 1,这些系数被称作**偏差修正(Bias Correction)**。
|
||||
* 根据函数极限的一条定理:
|
||||
|
||||
根据函数极限的一条定理:
|
||||
$${\lim_{\beta\to 0}}(1 - \beta)^{\frac{1}{\beta}} = \frac{1}{e} \approx 0.368$$
|
||||
|
||||
$${\lim\_{\beta\to 0}}(1 - \beta)^{\frac{1}{\beta}} = \frac{1}{e} \approx 0.368$$
|
||||
* 当 β 为 0.9 时,可以当作把过去 10 天的气温指数加权平均作为当日的气温,因为 10 天后权重已经下降到了当天的 1/3 左右。同理,当 β 为 0.98 时,可以把过去 50 天的气温指数加权平均作为当日的气温。因此,在计算当前时刻的平均值时,只需要前一天的平均值和当前时刻的值。
|
||||
|
||||
当 β 为 0.9 时,可以当作把过去 10 天的气温指数加权平均作为当日的气温,因为 10 天后权重已经下降到了当天的 1/3 左右。同理,当 β 为 0.98 时,可以把过去 50 天的气温指数加权平均作为当日的气温。
|
||||
|
||||
因此,在计算当前时刻的平均值时,只需要前一天的平均值和当前时刻的值。
|
||||
|
||||
$$v\_t = \beta v\_{t-1} + (1 - \beta)\theta_t$$
|
||||
|
||||
考虑到代码,只需要不断更新 v 即可:
|
||||
$$v_t = \beta v_{t-1} + (1 - \beta)\theta_t$$
|
||||
|
||||
$$v := \beta v + (1 - \beta)\theta_t$$
|
||||
<!--此处应有公式的实现代码-->
|
||||
|
||||
指数平均加权并**不是最精准**的计算平均数的方法,你可以直接计算过去 10 天或 50 天的平均值来得到更好的估计,但缺点是保存数据需要占用更多内存,执行更加复杂,计算成本更加高昂。
|
||||
|
||||
指数加权平均数公式的好处之一在于它只需要一行代码,且占用极少内存,因此**效率极高,且节省成本**。
|
||||
> 特点:指数平均加权并**不是最精准**的计算平均数的方法,你可以直接计算过去 10 天或 50 天的平均值来得到更好的估计,但缺点是保存数据需要占用更多内存,执行更加复杂,计算成本更加高昂。指数加权平均数公式的好处之一在于它只需要一行代码,且占用极少内存,因此**效率极高,且节省成本**。
|
||||
|
||||
### 指数平均加权的偏差修正
|
||||
|
||||
我们通常有
|
||||
$$v_0 = 0$$
|
||||
$$v_1 = 0.98v_0 + 0.02\theta_1$$
|
||||
|
||||
$$v\_0 = 0$$
|
||||
$$v\_1 = 0.98v\_0 + 0.02\theta\_1$$
|
||||
* $v_1$ 仅为第一个数据的 0.02(或者说 1-β),显然不准确。往后递推同理。因此,我们修改公式为
|
||||
|
||||
因此,$v\_1$ 仅为第一个数据的 0.02(或者说 1-β),显然不准确。往后递推同理。
|
||||
$$v_t = \frac{\beta v_{t-1} + (1 - \beta)\theta_t}{{1-\beta^t}}$$
|
||||
|
||||
因此,我们修改公式为
|
||||
* 随着 t 的增大,β 的 t 次方趋近于 0。因此当 t 很大的时候,偏差修正几乎没有作用,但是在前期学习可以帮助更好的预测数据。在实际过程中,一般会忽略前期偏差的影响。
|
||||
|
||||
$$v\_t = \frac{\beta v\_{t-1} + (1 - \beta)\theta_t}{{1-\beta^t}}$$
|
||||
### 动量梯度下降法
|
||||
|
||||
随着 t 的增大,β 的 t 次方趋近于 0。因此当 t 很大的时候,偏差修正几乎没有作用,但是在前期学习可以帮助更好的预测数据。在实际过程中,一般会忽略前期偏差的影响。
|
||||
|
||||
## 动量梯度下降法
|
||||
|
||||
**动量梯度下降(Gradient Descent with Momentum)**是计算梯度的指数加权平均数,并利用该值来更新参数值。具体过程为:
|
||||
* **动量梯度下降(Gradient Descent with Momentum)** 是计算梯度的指数加权平均数,并利用该值来更新参数值。具体过程为:
|
||||
|
||||
for l = 1, .. , L:
|
||||
|
||||
$$v\_{dW^{[l]}} = \beta v\_{dW^{[l]}} + (1 - \beta) dW^{[l]}$$
|
||||
$$v\_{db^{[l]}} = \beta v\_{db^{[l]}} + (1 - \beta) db^{[l]}$$
|
||||
$$W^{[l]} := W^{[l]} - \alpha v\_{dW^{[l]}}$$
|
||||
$$b^{[l]} := b^{[l]} - \alpha v\_{db^{[l]}}$$
|
||||
$$v_{dW^{[l]}} = \beta v_{dW^{[l]}} + (1 - \beta) dW^{[l]}$$
|
||||
$$v_{db^{[l]}} = \beta v_{db^{[l]}} + (1 - \beta) db^{[l]}$$
|
||||
$$W^{[l]} := W^{[l]} - \alpha v_{dW^{[l]}}$$
|
||||
$$b^{[l]} := b^{[l]} - \alpha v_{db^{[l]}}$$
|
||||
|
||||
其中,将动量衰减参数 β 设置为 0.9 是超参数的一个常见且效果不错的选择。当 β 被设置为 0 时,显然就成了 batch 梯度下降法。
|
||||
* 其中,将动量衰减参数 β 设置为 0.9 是超参数的一个常见且效果不错的选择。当 β 被设置为 0 时,显然就成了 batch 梯度下降法。
|
||||
|
||||
|
||||

|
||||
|
||||
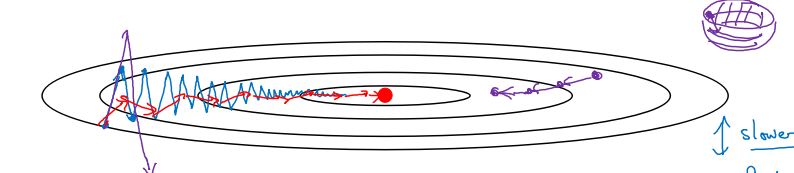
进行一般的梯度下降将会得到图中的蓝色曲线,由于存在上下波动,减缓了梯度下降的速度,因此只能使用一个较小的学习率进行迭代。如果用较大的学习率,结果可能会像紫色曲线一样偏离函数的范围。
|
||||
* 进行一般的梯度下降将会得到图中的蓝色曲线,由于存在上下波动,减缓了梯度下降的速度,因此只能使用一个较小的学习率进行迭代。如果用较大的学习率,结果可能会像紫色曲线一样偏离函数的范围。
|
||||
|
||||
而使用动量梯度下降时,通过累加过去的梯度值来减少抵达最小值路径上的波动,加速了收敛,因此在横轴方向下降得更快,从而得到图中红色的曲线。
|
||||
* 而使用动量梯度下降时,通过累加过去的梯度值来减少抵达最小值路径上的波动,加速了收敛,因此在横轴方向下降得更快,从而得到图中红色的曲线。
|
||||
|
||||
当前后梯度方向一致时,动量梯度下降能够加速学习;而前后梯度方向不一致时,动量梯度下降能够抑制震荡。
|
||||
* 当前后梯度方向一致时,动量梯度下降能够加速学习;而前后梯度方向不一致时,动量梯度下降能够抑制震荡。
|
||||
|
||||
另外,在 10 次迭代之后,移动平均已经不再是一个具有偏差的预测。因此实际在使用梯度下降法或者动量梯度下降法时,不会同时进行偏差修正。
|
||||
* 另外,在 10 次迭代之后,移动平均已经不再是一个具有偏差的预测。因此实际在使用梯度下降法或者动量梯度下降法时,不会同时进行偏差修正。
|
||||
|
||||
### 动量梯度下降法的形象解释
|
||||
|
||||
将成本函数想象为一个碗状,从顶部开始运动的小球向下滚,其中 dw,db 想象成球的加速度;而 $v\_{dw}$、$v\_{db}$ 相当于速度。
|
||||
* 将成本函数想象为一个碗状,从顶部开始运动的小球向下滚,其中 dw,db 想象成球的加速度;而 $v_{dw}$、$v_{db}$ 相当于速度。
|
||||
|
||||
小球在向下滚动的过程中,因为加速度的存在速度会变快,但是由于 β 的存在,其值小于 1,可以认为是摩擦力,所以球不会无限加速下去。
|
||||
* 小球在向下滚动的过程中,因为加速度的存在速度会变快,但是由于 β 的存在,其值小于 1,可以认为是摩擦力,所以球不会无限加速下去。
|
||||
|
||||
## RMSProp 算法
|
||||
## 3 RMSProp 算法
|
||||
|
||||
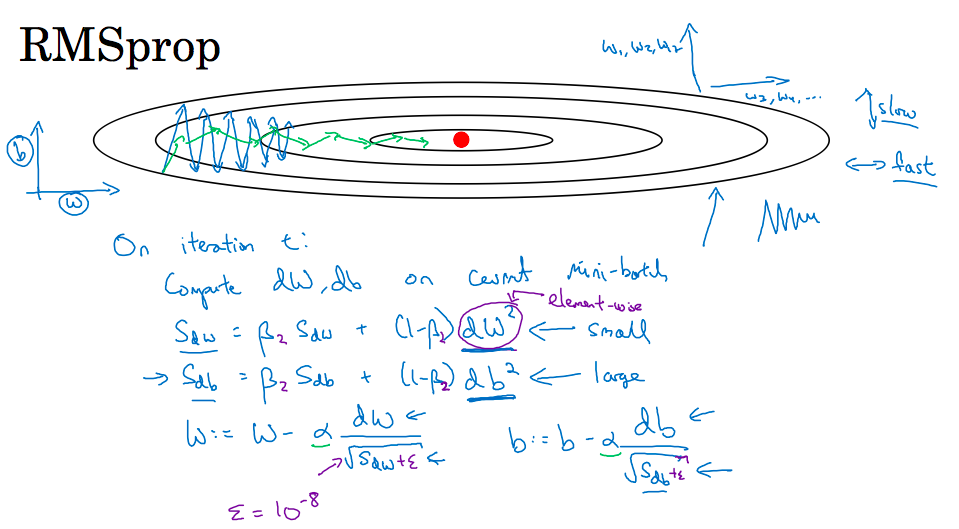
**RMSProp(Root Mean Square Propagation,均方根传播)**算法是在对梯度进行指数加权平均的基础上,引入平方和平方根。具体过程为(省略了 l):
|
||||
* **RMSProp(Root Mean Square Propagation,均方根传播)** 算法是在对梯度进行指数加权平均的基础上,引入平方和平方根。具体过程为(省略了 l):
|
||||
|
||||
$$s\_{dw} = \beta s\_{dw} + (1 - \beta)(dw)^2$$
|
||||
$$s\_{db} = \beta s\_{db} + (1 - \beta)(db)^2$$
|
||||
$$w := w - \alpha \frac{dw}{\sqrt{s\_{dw} + \epsilon}}$$
|
||||
$$b := b - \alpha \frac{db}{\sqrt{s\_{db} + \epsilon}}$$
|
||||
$$s_{dw} = \beta s_{dw} + (1 - \beta)(dw)^2$$
|
||||
$$s_{db} = \beta s_{db} + (1 - \beta)(db)^2$$
|
||||
$$w := w - \alpha \frac{dw}{\sqrt{s_{dw} + \epsilon}}$$
|
||||
$$b := b - \alpha \frac{db}{\sqrt{s_{db} + \epsilon}}$$
|
||||
|
||||
其中,ϵ 是一个实际操作时加上的较小数(例如10^-8),为了防止分母太小而导致的数值不稳定。
|
||||
* 其中,ϵ 是一个实际操作时加上的较小数(例如10^-8),为了防止分母太小而导致的数值不稳定。
|
||||
|
||||
当 dw 或 db 较大时,$(dw)^2$、$(db)^2$会较大,进而 $s\_{dw}$、$s\_{db}$也会较大,最终使得
|
||||
* 当 dw 或 db 较大时,$(dw)^2$、$(db)^2$会较大,进而 $s_{dw}$、$s_{db}$也会较大,最终使得梯度变化较小,从而减小某些维度梯度更新波动较大的情况,使下降速度变得更快。
|
||||
|
||||
$$\frac{dw}{\sqrt{s\_{dw} + \epsilon}}$$
|
||||
|
||||
和
|
||||
$$\frac{dw}{\sqrt{s_{dw} + \epsilon}}$$
|
||||
|
||||
$$\frac{db}{\sqrt{s\_{db} + \epsilon}}$$
|
||||
$$\frac{db}{\sqrt{s_{db} + \epsilon}}$$
|
||||
|
||||
较小,从而减小某些维度梯度更新波动较大的情况,使下降速度变得更快。
|
||||
|
||||
|
||||

|
||||
|
||||
RMSProp 有助于减少抵达最小值路径上的摆动,并允许使用一个更大的学习率 α,从而加快算法学习速度。并且,它和 Adam 优化算法已被证明适用于不同的深度学习网络结构。
|
||||
|
||||
注意,β 也是一个超参数。
|
||||
> RMSProp 有助于减少抵达最小值路径上的摆动,并允许使用一个更大的学习率 α,从而加快算法学习速度。并且,它和 Adam 优化算法已被证明适用于不同的深度学习网络结构。注意,β 也是一个超参数。
|
||||
|
||||
## Adam 优化算法
|
||||
|
||||
**Adam 优化算法(Adaptive Moment Estimation,自适应矩估计)**基本上就是将 Momentum 和 RMSProp 算法结合在一起,通常有超越二者单独时的效果。具体过程如下(省略了 l):
|
||||
* **Adam 优化算法(Adaptive Moment Estimation,自适应矩估计)** 基本上就是将 Momentum 和 RMSProp 算法结合在一起,通常有超越二者单独时的效果。具体过程如下(省略了 l):
|
||||
|
||||
首先进行初始化:
|
||||
1. 首先进行初始化
|
||||
$$v_{dW} = 0, s_{dW} = 0, v_{db} = 0, s_{db} = 0$$
|
||||
2. 用每一个 mini-batch 计算 dW、db,第 t 次迭代时:
|
||||
|
||||
$$v\_{dW} = 0, s\_{dW} = 0, v\_{db} = 0, s\_{db} = 0$$
|
||||
$$v_{dW} = \beta_1 v_{dW} + (1 - \beta_1) dW$$
|
||||
$$v_{db} = \beta_1 v_{db} + (1 - \beta_1) db$$
|
||||
$$s_{dW} = \beta_2 s_{dW} + (1 - \beta_2) {(dW)}^2$$
|
||||
$$s_{db} = \beta_2 s_{db} + (1 - \beta_2) {(db)}^2$$
|
||||
|
||||
用每一个 mini-batch 计算 dW、db,第 t 次迭代时:
|
||||
3. 一般使用 Adam 算法时需要计算偏差修正:
|
||||
|
||||
$$v\_{dW} = \beta\_1 v\_{dW} + (1 - \beta\_1) dW$$
|
||||
$$v\_{db} = \beta\_1 v\_{db} + (1 - \beta\_1) db$$
|
||||
$$s\_{dW} = \beta\_2 s\_{dW} + (1 - \beta\_2) {(dW)}^2$$
|
||||
$$s\_{db} = \beta\_2 s\_{db} + (1 - \beta\_2) {(db)}^2$$
|
||||
$$v^{corrected}_{dW} = \frac{v_{dW}}{1-{\beta_1}^t}$$
|
||||
$$v^{corrected}_{db} = \frac{v_{db}}{1-{\beta_1}^t}$$
|
||||
$$s^{corrected}_{dW} = \frac{s_{dW}}{1-{\beta_2}^t}$$
|
||||
$$s^{corrected}_{db} = \frac{s_{db}}{1-{\beta_2}^t}$$
|
||||
|
||||
一般使用 Adam 算法时需要计算偏差修正:
|
||||
4. 更新 W、b 时有:
|
||||
|
||||
$$v^{corrected}\_{dW} = \frac{v\_{dW}}{1-{\beta\_1}^t}$$
|
||||
$$v^{corrected}\_{db} = \frac{v\_{db}}{1-{\beta\_1}^t}$$
|
||||
$$s^{corrected}\_{dW} = \frac{s\_{dW}}{1-{\beta\_2}^t}$$
|
||||
$$s^{corrected}\_{db} = \frac{s\_{db}}{1-{\beta\_2}^t}$$
|
||||
$$W := W - \alpha \frac{v^{corrected}_{dW}}{{\sqrt{s^{corrected}_{dW}} + \epsilon}}$$
|
||||
|
||||
所以,更新 W、b 时有:
|
||||
$$b := b - \alpha \frac{v^{corrected}_{db}}{{\sqrt{s^{corrected}_{db}} + \epsilon}}$$
|
||||
|
||||
$$W := W - \alpha \frac{v^{corrected}\_{dW}}{{\sqrt{s^{corrected}\_{dW}} + \epsilon}}$$
|
||||
|
||||
$$b := b - \alpha \frac{v^{corrected}\_{db}}{{\sqrt{s^{corrected}\_{db}} + \epsilon}}$$
|
||||
|
||||
(可以看到 Andrew 在这里 ϵ 没有写到平方根里去,和他在 RMSProp 中写的不太一样。考虑到 ϵ 所起的作用,我感觉影响不大)
|
||||
> (可以看到 Andrew 在这里 ϵ 没有写到平方根里去,和他在 RMSProp 中写的不太一样。考虑到 ϵ 所起的作用,我感觉影响不大)
|
||||
|
||||
### 超参数的选择
|
||||
|
||||
Adam 优化算法有很多的超参数,其中
|
||||
|
||||
* 学习率 α:需要尝试一系列的值,来寻找比较合适的;
|
||||
* β1:常用的缺省值为 0.9;
|
||||
* β2:Adam 算法的作者建议为 0.999;
|
||||
* ϵ:不重要,不会影响算法表现,Adam 算法的作者建议为 $10^{-8}$;
|
||||
|
||||
β1、β2、ϵ 通常不需要调试。
|
||||
> β1、β2、ϵ 通常不需要调试。
|
||||
|
||||
## 学习率衰减
|
||||
|
||||
如果设置一个固定的学习率 α,在最小值点附近,由于不同的 batch 中存在一定的噪声,因此不会精确收敛,而是始终在最小值周围一个较大的范围内波动。
|
||||
* 如果设置一个固定的学习率 α,在最小值点附近,由于不同的 batch 中存在一定的噪声,因此不会精确收敛,而是始终在最小值周围一个较大的范围内波动。而如果随着时间慢慢减少学习率 α 的大小,在初期 α 较大时,下降的步长较大,能以较快的速度进行梯度下降;而后期逐步减小 α 的值,即减小步长,有助于算法的收敛,更容易接近最优解。
|
||||
|
||||
而如果随着时间慢慢减少学习率 α 的大小,在初期 α 较大时,下降的步长较大,能以较快的速度进行梯度下降;而后期逐步减小 α 的值,即减小步长,有助于算法的收敛,更容易接近最优解。
|
||||
* 最常用的学习率衰减方法,其中,`decay_rate`为衰减率(超参数),`epoch_num`为将所有的训练样本完整过一遍的次数。
|
||||
|
||||
最常用的学习率衰减方法:
|
||||
$$\alpha = \frac{1}{1 + decay\\_rate * epoch\\_num} * \alpha_0$$
|
||||
|
||||
$$\alpha = \frac{1}{1 + decay\\\_rate \* epoch\\\_num} \* \alpha\_0$$
|
||||
|
||||
其中,`decay_rate`为衰减率(超参数),`epoch_num`为将所有的训练样本完整过一遍的次数。
|
||||
|
||||
* 指数衰减:
|
||||
|
||||
$$\alpha = 0.95^{epoch\\\_num} \* \alpha\_0$$
|
||||
$$\alpha = 0.95^{epoch\\_num} * \alpha_0$$
|
||||
|
||||
* 其他:
|
||||
|
||||
$$\alpha = \frac{k}{\sqrt{epoch\\\_num}} \* \alpha\_0$$
|
||||
$$\alpha = \frac{k}{\sqrt{epoch\\_num}} * \alpha_0$$
|
||||
|
||||
* 离散下降
|
||||
$$分段函数$$
|
||||
|
||||
对于较小的模型,也有人会在训练时根据进度手动调小学习率。
|
||||
|
||||
* 对于较小的模型,也有人会在训练时根据进度手动调小学习率。
|
||||
|
||||
## 局部最优问题
|
||||
|
||||
|
||||
### 鞍点
|
||||

|
||||
|
||||
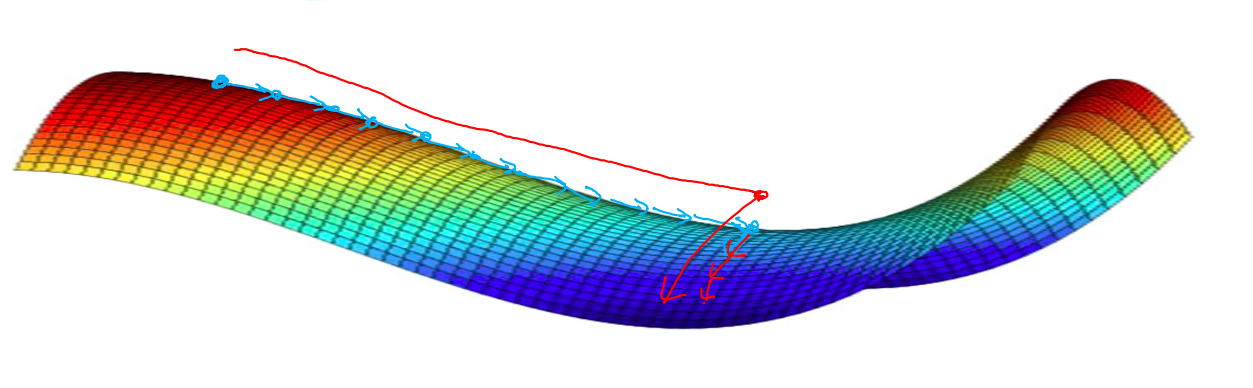
**鞍点(saddle)**是函数上的导数为零,但不是轴上局部极值的点。当我们建立一个神经网络时,通常梯度为零的点是上图所示的鞍点,而非局部最小值。减少损失的难度也来自误差曲面中的鞍点,而不是局部最低点。因为在一个具有高维度空间的成本函数中,如果梯度为 0,那么在每个方向,成本函数或是凸函数,或是凹函数。而所有维度均需要是凹函数的概率极小,因此在低维度的局部最优点的情况并不适用于高维度。
|
||||
* **鞍点(saddle)** 是函数上的导数为零,但不是轴上局部极值的点。当我们建立一个神经网络时,通常梯度为零的点是上图所示的鞍点,而非局部最小值。减少损失的难度也来自误差曲面中的鞍点,而不是局部最低点。因为在一个具有高维度空间的成本函数中,如果梯度为 0,那么在每个方向,成本函数或是凸函数,或是凹函数。而所有维度均需要是凹函数的概率极小,因此在低维度的局部最优点的情况并不适用于高维度。
|
||||
|
||||
结论:
|
||||
### 结论
|
||||
|
||||
* 在训练较大的神经网络、存在大量参数,并且成本函数被定义在较高的维度空间时,困在极差的局部最优中是不大可能的;
|
||||
* 鞍点附近的平稳段会使得学习非常缓慢,而这也是动量梯度下降法、RMSProp 以及 Adam 优化算法能够加速学习的原因,它们能帮助尽早走出平稳段。
|
||||
|
||||
Reference in New Issue
Block a user